《动手学Moveit2》3.安装Moveit2测试
-
@1522346936 相同版本但某个包的api接口不一定不变,小版本还是在更新,humble只是一个维护的大版本代称
-
@小鱼 鱼哥我也遇到了一样的问题,版本是双系统ubuntu22.04 humble,完全按照步骤来的,然后最后一步出现了一模一样的问题
-
此回复已被删除! -
@小鱼 https://moveit.picknik.ai/humble/doc/tutorials/getting_started/getting_started.html 鱼哥看看这个,好像是因为多了一个vcstool的安装,我按照这个来的很顺利
-
@Karos 好的,我测试下,然后更新下文档。
-
此回复已被删除! -
此回复已被删除! -
@小鱼 不好意思鱼哥,我这段时间没上网站,刚看到,我下次会注意。我的系统是22.04,ros2版本是humble,我按照你新发布的安装方法安装成功了,但是在安装过程中出现了以下几处异常的地方,请问有没有影响,该怎么解决?
Starting >>> moveit_resources_pr2_description --- stderr: launch_param_builder /usr/lib/python3/dist-packages/setuptools/command/install.py:34: SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools. warnings.warn( --- Finished <<< launch_param_builder [1.23s]Starting >>> rosparam_shortcuts --- stderr: moveit_configs_utils /usr/lib/python3/dist-packages/setuptools/command/install.py:34: SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools. warnings.warn( --- Finished <<< moveit_configs_utils [1.26s][Processing: moveit_setup_srdf_plugins] --- stderr: moveit_setup_srdf_plugins /home/wadd/moveit2_ws/src/moveit2/moveit_setup_assistant/moveit_setup_srdf_plugins/include/moveit_setup_srdf_plugins/rotated_header_view.hpp:0: Note: No relevant classes found. No output generated. ---Finished <<< moveit_setup_srdf_plugins [4min 5s]
-
@吨吨炖丸子 前两个 SetuptoolsDeprecationWarning 错误之前有发过解决方案,你可以再右上角搜一下。
@小鱼 在 [常见问题]Colcon编译 Setuptools DeprecationWarning: setup.py install is deprecated. 中说:
该问题是使用Colcon编译Python功能包出现的。
--- stderr: example_parameters_rclpy
/usr/lib/python3/dist-packages/setuptools/command/install.py:34: SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools.
warnings.warn(解决方案如下:
sudo pip install setuptools==58.2.0 --upgrade至于另外一个错误应该也没关系,只是个warn。
另外下次可以新提一个帖子,这个楼盖的太高了,不好爬~哈
-
@小鱼 好的鱼哥,感谢
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
小鱼如果要控制实际机械臂,但都是launch.py 文件我需要修改哪些东西
-
在配置助手生成的功能包里,config文件夹没有 ompl.ymal 的文件,是因为二进制安装的moveit2无法调用ompl库里的其他算法吗。
-
小鱼老师,这是什么问题?以前从没出现过。 -
@小鱼 鱼哥,我的系统是ubuntu20.6,用你的一键安装,里面没有humble版本,只有rolling版本,咋回事
-
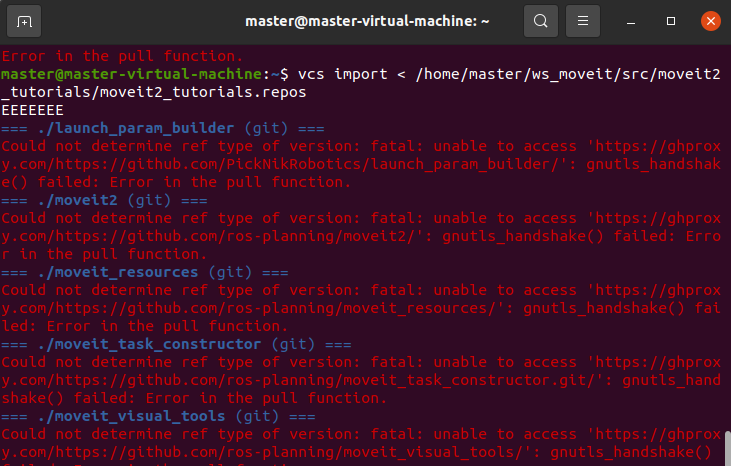
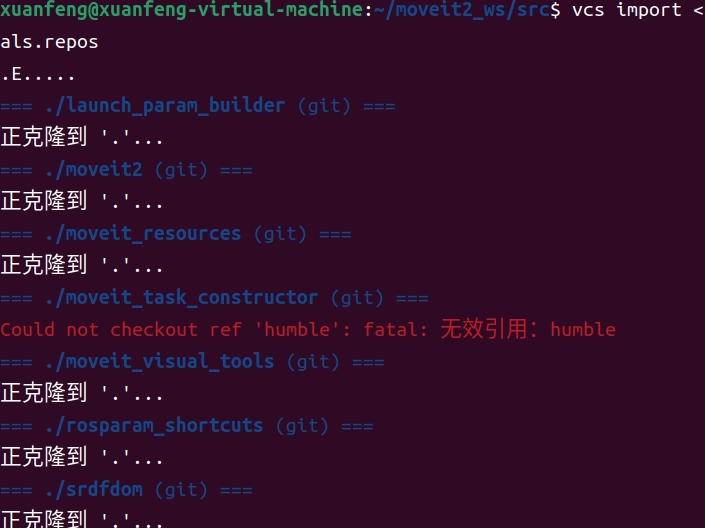
在克隆moveit2_tutorials.repos的时候出现这么多错误,咋回事,鱼哥 -
-
安装可以打开样例,但是打开官方的样例:ros2 launch moveit2_tutorials demo.launch.py rviz_tutorial:=true的时候报错:Package 'moveit2_tutorials' not found: "package 'moveit2_tutorials' not found, searching: ['/opt/ros/humble']",咋回事,鱼哥
-
-
![04L[BTPED46TOLO]VV%WCI.png
-
colcon build --mixin release
Starting >>> geometric_shapes
Starting >>> moveit_msgs
Starting >>> moveit_common
Starting >>> moveit_resources_panda_description
Starting >>> launch_param_builder
Starting >>> moveit_resources_fanuc_description
Starting >>> moveit_resources_pr2_description
Starting >>> moveit_resources_prbt_support
Starting >>> rviz_visual_tools
--- stderr: geometric_shapes
CMake Error at CMakeLists.txt:54 (find_package):
By not providing "Findeigen_stl_containers.cmake" in CMAKE_MODULE_PATH this
project has asked CMake to find a package configuration file provided by
"eigen_stl_containers", but CMake did not find one.Could not find a package configuration file provided by
"eigen_stl_containers" with any of the following names:eigen_stl_containersConfig.cmake eigen_stl_containers-config.cmakeAdd the installation prefix of "eigen_stl_containers" to CMAKE_PREFIX_PATH
or set "eigen_stl_containers_DIR" to a directory containing one of the
above files. If "eigen_stl_containers" provides a separate development
package or SDK, be sure it has been installed.
Failed <<< geometric_shapes [0.98s, exited with code 1]
Aborted <<< moveit_resources_panda_description [0.94s]
Aborted <<< moveit_common [0.95s]
Aborted <<< moveit_resources_fanuc_description [0.94s]
Aborted <<< moveit_resources_prbt_support [0.93s]
Aborted <<< moveit_resources_pr2_description [0.95s]
Aborted <<< moveit_msgs [1.14s]
Aborted <<< launch_param_builder [1.62s]
Aborted <<< rviz_visual_tools [2.55s]Summary: 0 packages finished [3.77s]
1 package failed: geometric_shapes
8 packages aborted: launch_param_builder moveit_common moveit_msgs moveit_resources_fanuc_description moveit_resources_panda_description moveit_resources_pr2_description moveit_resources_prbt_support rviz_visual_tools
3 packages had stderr output: geometric_shapes moveit_msgs rviz_visual_tools
36 packages not processed
这个错误 怎么处理,一堆依赖问题,手动安装也安装不了
{kind=link}