[FishBot教程] 9.0.3. 主控板固件烧录与配置
-
@1445721547 @1162410807 @小鱼
我已经解决了:可以先重置物理机和虚拟机网络
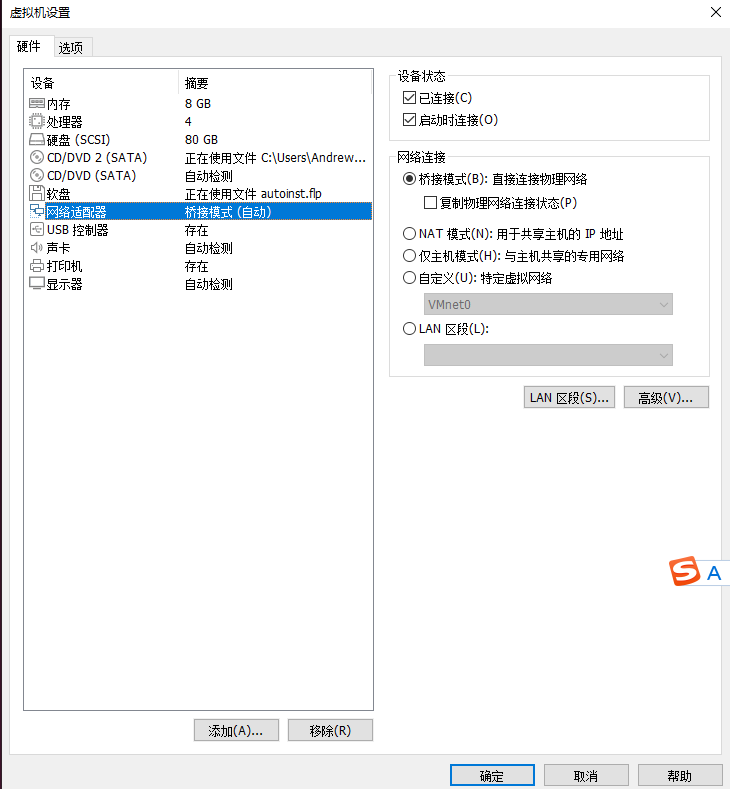
1. 虚拟机选桥接,注意关闭主机防火墙
(可以在虚拟网络编辑器中直接设置桥接到主机连wifi的网卡)
2.小车电脑链接相同wifi后,确保虚拟机和小车在相同子网就能ping通
尽量用wifi不要用电脑开的热点,我这儿总有问题哈哈 -
A andrew_liumuran 在 中 引用了 这个主题
-
这段时间一直在学orb_slam3,没有关注社区,刚刚看到你的整机都做出来了,热烈祝贺

-
-
此回复已被删除! -
此回复已被删除! -
ip地址一直处于wait connect怎么解决呢
-
@1738836685 确认WIFI帐号密码是否正确配置,确定WIFI是否属于2.4G
-
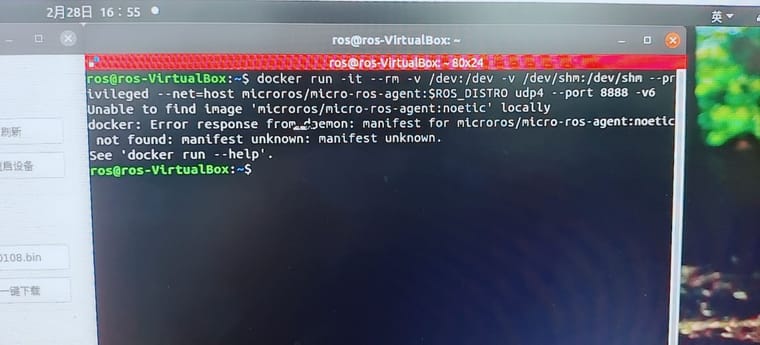
前面配置全都成功了 出现了这个报错 -
@1738836685 在docker前增加sudo
-
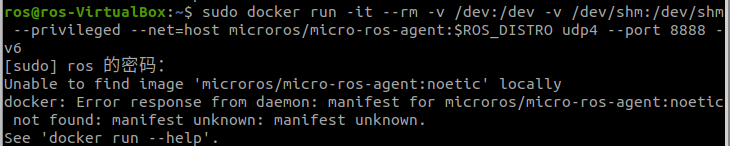
@1738836685 还是失败
-
鱼哥 还是失败 还是那个界面
-
-
@1738836685 要用foxy或者humble版本的ROS2,你系统目前的是noetic,重新安装下
-
@1738836685 我可以不用虚拟机 直接Linux系统可以吗
-
@1738836685 可以的,挺推荐这样的
-
鱼哥 我这固件烧录的时候固件下载完成 但是烧录的时候 固件写入失败 ,请检查日志 或重试 这个问题怎么解决呢
-
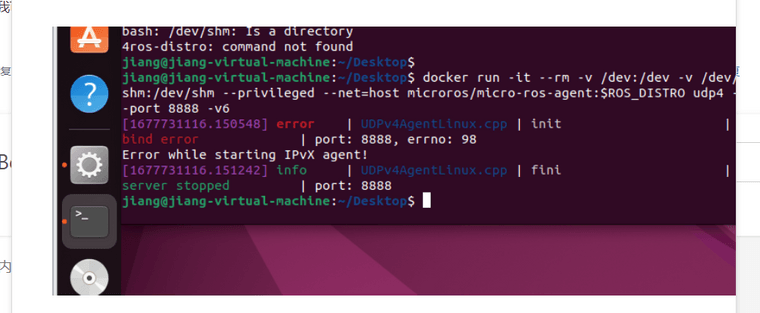
鱼哥,我按照流程一步步来,但是启动MicroROS时就会遇到如下报错,不知道怎么解决。我之前已经用这个指令下载了东西,但是从来没有像文中写的那样终端不断接受信息。
-
-
@小鱼 是必须要用ros2吗,因为我用的Ubuntu20.0如果需要重装的话有点麻烦,原来建好的那个一些模型代码也没有了
-
@1846805799 目前仅支持ROS2,ubuntu20可以装foxy版本ros2
