小鱼的一键安装系列
-
@是啊时钟转太快 了解了,我会在这两天制作更新下n卡版本的镜像,搞定后给你回帖。
-
@小鱼 感谢!!!!
-
bash: /opt/ros/humble/setup.bash: 没有那个文件或目录
安装完成~
Run CMD Task:[code --install-extension ms-vscode-remote.remote-containers --user-data-dir]
Installing extensions...
Extension 'ms-vscode-remote.remote-containers' v0.241.3 is already installed. Use '--force' option to update to latest version or provide '@<version>' to install a specific version, for example: 'ms-vscode-remote.remote-containers@1.2.3'.
===========================后续使用指令=================================
后续可在任意终端输入tur im.nouoqing来启动/停止/测试/删除容器
==============================文件存储位置===============================
你的主目录已经和容器的对应目录做了映射
==============================问题反馈&&更新讨论=============================
请访问社区的一键安装版块:https://fishros.org.cn/forum/topic/112
欢迎加入机器人学习交流QQ群:139707339(入群口令:一键安装)
如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈
[sudo] tl 的密码:
bash: /opt/ros/humble/setup.bash: 没有那个文件或目录
tl@tl-VirtualBox:~$输入密码以后就会显示bash:哪一行,没有文件。这种要怎么解决呢。
-
在ubuntu22.04下无法安装foxy,硬件环境amd64,终端输出如下:
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:humble(ROS2)
[2]:rolling(ROS2)
[3]:foxy(ROS2)
[4]:noetic(ROS1)
[0]:quit
请输入[]内的数字以选择:3
RUN Choose Task:[请输入括号内的数字]
请选择安装的具体版本(如果不知道怎么选,请选1桌面版):
[1]:foxy(ROS2)桌面版
[2]:foxy(ROS2)基础版(小)
[0]:quit
请输入[]内的数字以选择:1
Run CMD Task:[sudo apt-cache search aptitude ]
[|]aptitude-common - architecture independent files for the aptitude package man[/]aptitude-doc-en - English manual for aptitude, a terminal-based package manag[]aptitude-doc-es - Spanish manual for aptitude, a terminal-based package manag[|]aptitude-doc-fi - Finnish manual for aptitude, a terminal-based package manag[-]aptitude-doc-fr - French manual for aptitude, a terminal-based package manage[/]aptitude-doc-it - Italian manual for aptitude, a terminal-based package manag[]aptitude-doc-ja - Japanese manual for aptitude, a terminal-based package mana[-]aptitude-doc-ru - Russian manual for aptitude, a terminal-based package manag[]libcwidget-dev - high-level terminal interface library for C++ (development f[|]apt-cacher - Caching proxy server for Debian/Ubuntu/Devuan software repositor[/]apticron-systemd - Simple tool to mail about pending package updates - system[-]Result:success end for Debian/UbuntuRun CMD Task:[sudo apt install aptitude -y]
[]升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 22 个软件包未被[-]Result:successRun CMD Task:[sudo apt-cache search aptitude ]
[|]aptitude-common - architecture independent files for the aptitude package man[/]aptitude-doc-en - English manual for aptitude, a terminal-based package manag[]aptitude-doc-es - Spanish manual for aptitude, a terminal-based package manag[|]aptitude-doc-fi - Finnish manual for aptitude, a terminal-based package manag[-]aptitude-doc-fr - French manual for aptitude, a terminal-based package manage[/]aptitude-doc-it - Italian manual for aptitude, a terminal-based package manag[]aptitude-doc-ja - Japanese manual for aptitude, a terminal-based package mana[-]aptitude-doc-ru - Russian manual for aptitude, a terminal-based package manag[]libcwidget-dev - high-level terminal interface library for C++ (development f[|]apt-cacher - Caching proxy server for Debian/Ubuntu/Devuan software repositor[/]apticron-systemd - Simple tool to mail about pending package updates - system[-]Result:success end for Debian/UbuntuRun CMD Task:[sudo apt install aptitude -y]
[]升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 22 个软件包未被[-]Result:successRun CMD Task:[sudo apt install ros-foxy-desktop -y]
正在读取软件包列表... 完成
正在分析软件包的依赖关系树... 完成
正在读取状态信息... 完成
E: 无法定位软件包 ros-foxy-desktop
Run CMD Task:[sudo apt install ros-foxy-desktop -y]
[-]Result:code:100Run CMD Task:[sudo apt-cache search python3-colcon-common-extensions ]
[]python3-colcon-common-extensions - Meta package aggregating colcon-core and c[-]Result:successRun CMD Task:[sudo apt install python3-colcon-common-extensions -y]
[]升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 22 个软件包未被[-]Result:successRun CMD Task:[sudo apt-cache search python3-argcomplete ]
[-]Result:success for argparse (for Python 3)Run CMD Task:[sudo apt install python3-argcomplete -y]
[]升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 22 个软件包未被[-]Result:successRun CMD Task:[sudo apt-cache search python3-rosdep ]
[]python3-rosdep2 - rosdep package manager abstraction tool for Robot OS (Pytho[-]Result:success anager abstraction tool for ROSRun CMD Task:[sudo apt install python3-rosdep -y]
[]升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 22 个软件包未被[-]Result:successRun CMD Task:[ls /opt/ros/foxy/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/foxy/setup.bash]
[-]Result:code:2欢迎加入机器人学习交流QQ群:139707339(入群口令:一键安装)
如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈 -
@东方朔 ubuntu22.04不应该会出现foxy选项的,非常奇怪,请选择humble版本试试
-
@小鱼 humble安装是没有问题的,前几天已经安装过了
-
系统 虚拟机ubuntu 22.04
ros安装方式 docker+melodic(vscode加插件开发)
出现的问题 运行atkin_make时,报错
错误指令 CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "styd_msgs" with
any of the following names:styd_msgsConfig.cmake styd_msgs-config.cmakeAdd the installation prefix of "styd_msgs" to CMAKE_PREFIX_PATH or set
"styd_msgs_DIR" to a directory containing one of the above files. If
"styd_msgs" provides a separate development package or SDK, be sure it has
been installed.
Call Stack (most recent call first):
learning_topic/CMakeLists.txt:10 (find_package)-- Configuring incomplete, errors occurred!
See also "/home/tian/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/tian/catkin_ws/build/CMakeFiles/CMakeError.log".
Makefile:530: recipe for target 'cmake_check_build_system' failed
make: *** [cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed -
-
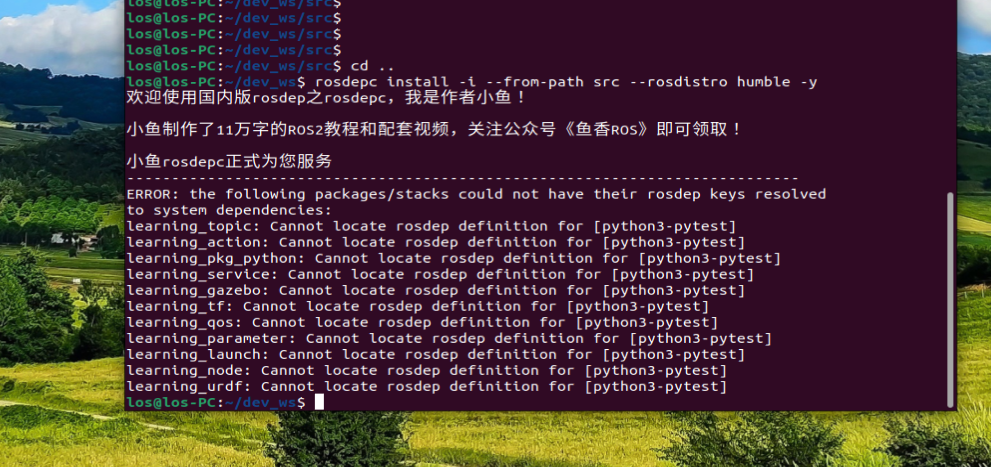
您好,我在用这个指令的时候出现了这种问题,请问如何解决啊?“rosdepc install -i --from-path src --rosdistro humble -y” -
@LOS 加個-r繼續就行
-
-
@小鱼 在哪里加啊,我是小白
不太懂呀 -
@小鱼 rosdepc install -i --from-path src --rosdistro humble -y
在这个代码最后面吗
rosdepc install -i --from-path src --rosdistro humble -y -r -
此回复已被删除! -
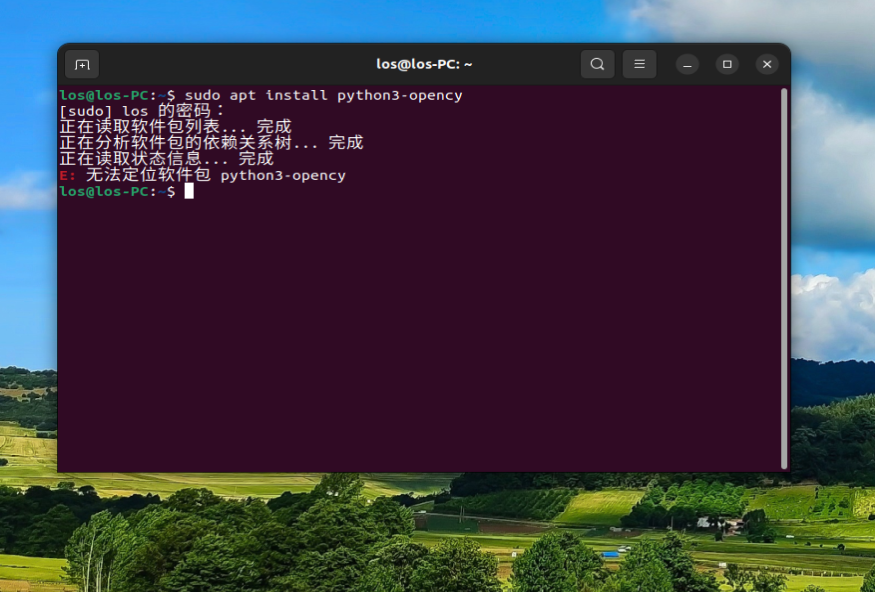
@小鱼 你好,请问这个“opency”安装提示无法定位软件包,该怎么做啊?
-
@LOS 你打错了,是opencv
-
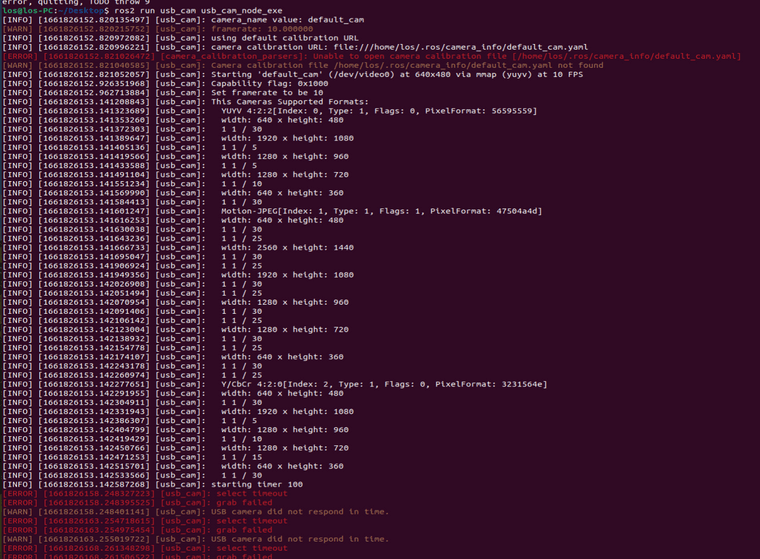 你好,配置系统内部的相机的时候输入这样的代码“ros2 run usb_cam usb_cam_node_exe”为什么会一直报错啊?
你好,配置系统内部的相机的时候输入这样的代码“ros2 run usb_cam usb_cam_node_exe”为什么会一直报错啊? -
apt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', 'W: GPG 错误:https://packages.ros.org/ros/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654\n', 'E: 仓库 “https://packages.ros.org/ros/ubuntu bionic InRelease” 没有数字签名。\n', 'W: GPG 错误:https://packages.ros.org/ros2/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654\n', 'E: 仓库 “https://packages.ros.org/ros2/ubuntu bionic InRelease” 没有数字签名。\n']
四次换源后都失败了,请及时联系小鱼获取解决方案并处理!
Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success e development metapackageKerberosRun CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2 -
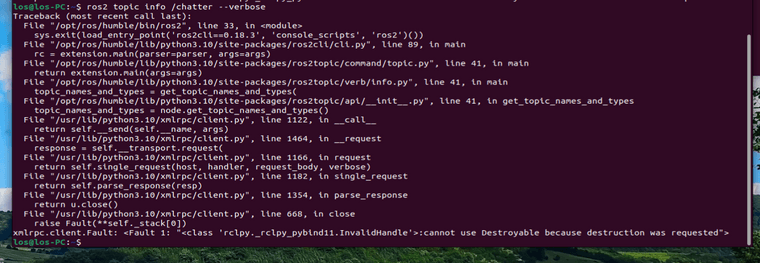 在命令行中配置DDS,输入“ros2 topic info /chatter --verbose”代码为什么会报这样的错误?
在命令行中配置DDS,输入“ros2 topic info /chatter --verbose”代码为什么会报这样的错误? -
Ubuntu16.04 多次换源失败....还有办法吗?
*apt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', "E: The repository 'https://packages.ros.org/ros/ubuntu xenial Release' does not have a Release file.\n", "E: The repository 'https://packages.ros.org/ros2/ubuntu xenial Release' does not have a Release file.\n"]
四次换源后都失败了,请及时联系小鱼获取解决方案并处理!
Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success e development metapackageKerberosRun CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2*