小鱼的一键安装系列
-
@东方朔 ubuntu22.04不应该会出现foxy选项的,非常奇怪,请选择humble版本试试
-
@小鱼 humble安装是没有问题的,前几天已经安装过了
-
系统 虚拟机ubuntu 22.04
ros安装方式 docker+melodic(vscode加插件开发)
出现的问题 运行atkin_make时,报错
错误指令 CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "styd_msgs" with
any of the following names:styd_msgsConfig.cmake styd_msgs-config.cmakeAdd the installation prefix of "styd_msgs" to CMAKE_PREFIX_PATH or set
"styd_msgs_DIR" to a directory containing one of the above files. If
"styd_msgs" provides a separate development package or SDK, be sure it has
been installed.
Call Stack (most recent call first):
learning_topic/CMakeLists.txt:10 (find_package)-- Configuring incomplete, errors occurred!
See also "/home/tian/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/tian/catkin_ws/build/CMakeFiles/CMakeError.log".
Makefile:530: recipe for target 'cmake_check_build_system' failed
make: *** [cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed -
-
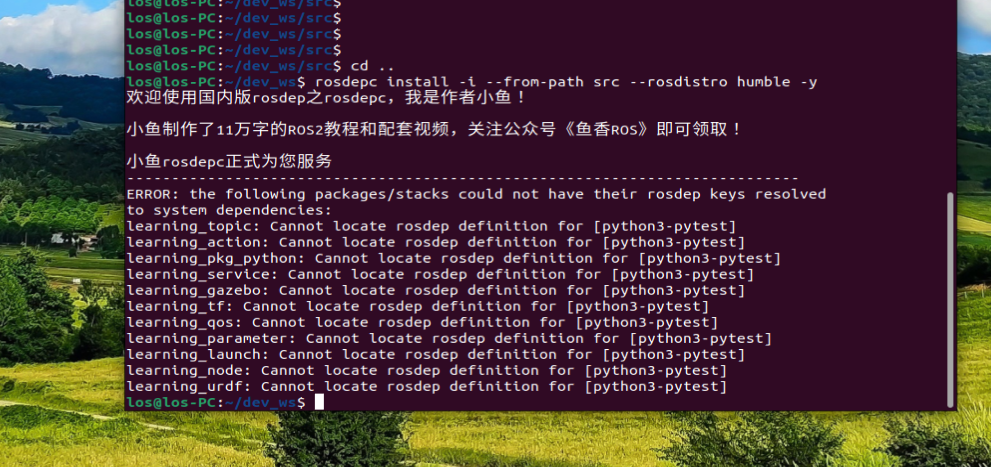
您好,我在用这个指令的时候出现了这种问题,请问如何解决啊?“rosdepc install -i --from-path src --rosdistro humble -y” -
@LOS 加個-r繼續就行
-
-
@小鱼 在哪里加啊,我是小白
不太懂呀 -
@小鱼 rosdepc install -i --from-path src --rosdistro humble -y
在这个代码最后面吗
rosdepc install -i --from-path src --rosdistro humble -y -r -
此回复已被删除! -
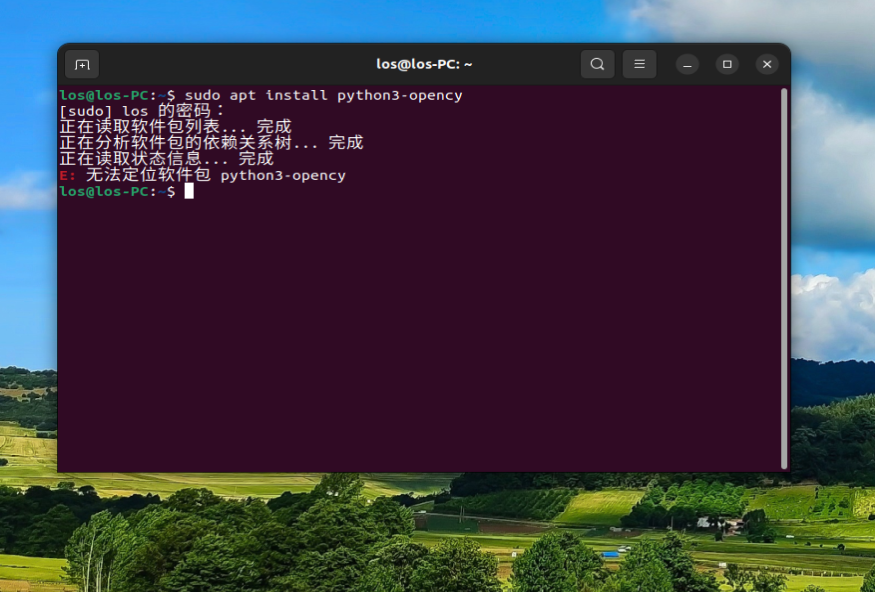
@小鱼 你好,请问这个“opency”安装提示无法定位软件包,该怎么做啊?
-
@LOS 你打错了,是opencv
-
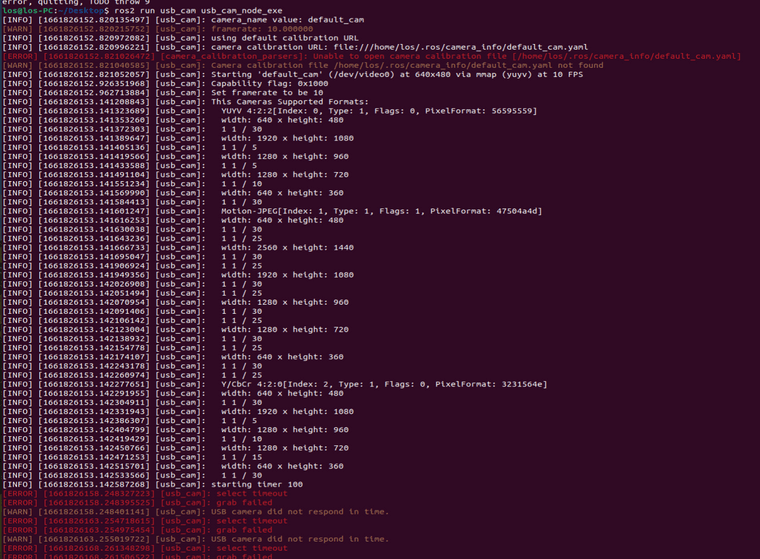 你好,配置系统内部的相机的时候输入这样的代码“ros2 run usb_cam usb_cam_node_exe”为什么会一直报错啊?
你好,配置系统内部的相机的时候输入这样的代码“ros2 run usb_cam usb_cam_node_exe”为什么会一直报错啊? -
apt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', 'W: GPG 错误:https://packages.ros.org/ros/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654\n', 'E: 仓库 “https://packages.ros.org/ros/ubuntu bionic InRelease” 没有数字签名。\n', 'W: GPG 错误:https://packages.ros.org/ros2/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654\n', 'E: 仓库 “https://packages.ros.org/ros2/ubuntu bionic InRelease” 没有数字签名。\n']
四次换源后都失败了,请及时联系小鱼获取解决方案并处理!
Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success e development metapackageKerberosRun CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2 -
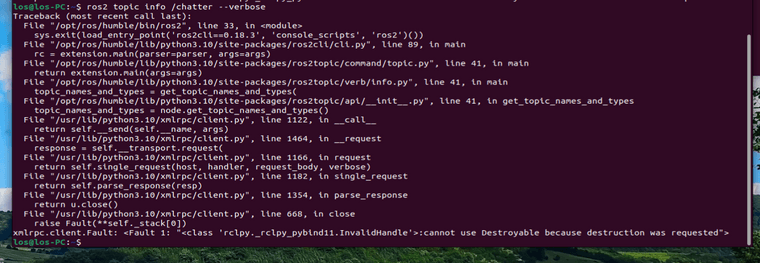 在命令行中配置DDS,输入“ros2 topic info /chatter --verbose”代码为什么会报这样的错误?
在命令行中配置DDS,输入“ros2 topic info /chatter --verbose”代码为什么会报这样的错误? -
Ubuntu16.04 多次换源失败....还有办法吗?
*apt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', "E: The repository 'https://packages.ros.org/ros/ubuntu xenial Release' does not have a Release file.\n", "E: The repository 'https://packages.ros.org/ros2/ubuntu xenial Release' does not have a Release file.\n"]
四次换源后都失败了,请及时联系小鱼获取解决方案并处理!
Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success e development metapackageKerberosRun CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2* -
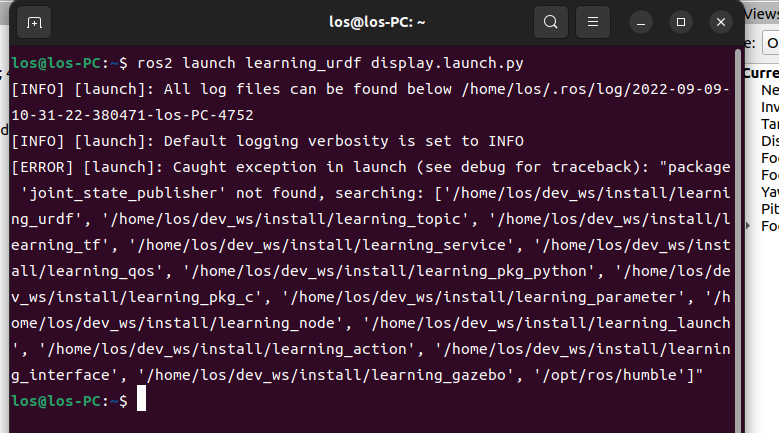 你好,请问启动机器人这样报错该怎么做啊?
你好,请问启动机器人这样报错该怎么做啊? -
@LOS 前面rosdepc指令用错了应该是,你可以手动安装一下缺少的包
-
安装完成后小乌龟不能动,rviz启动不了
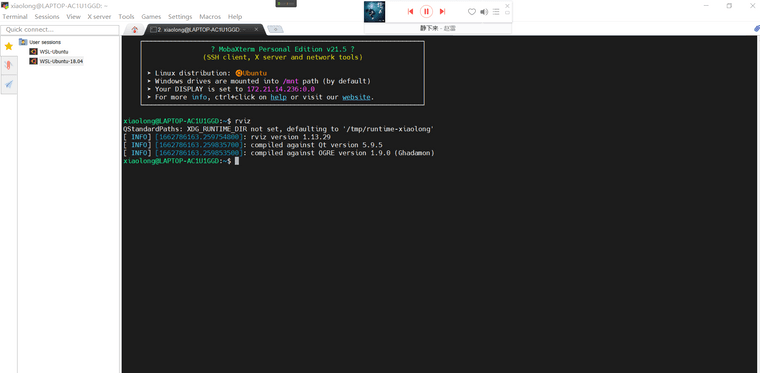
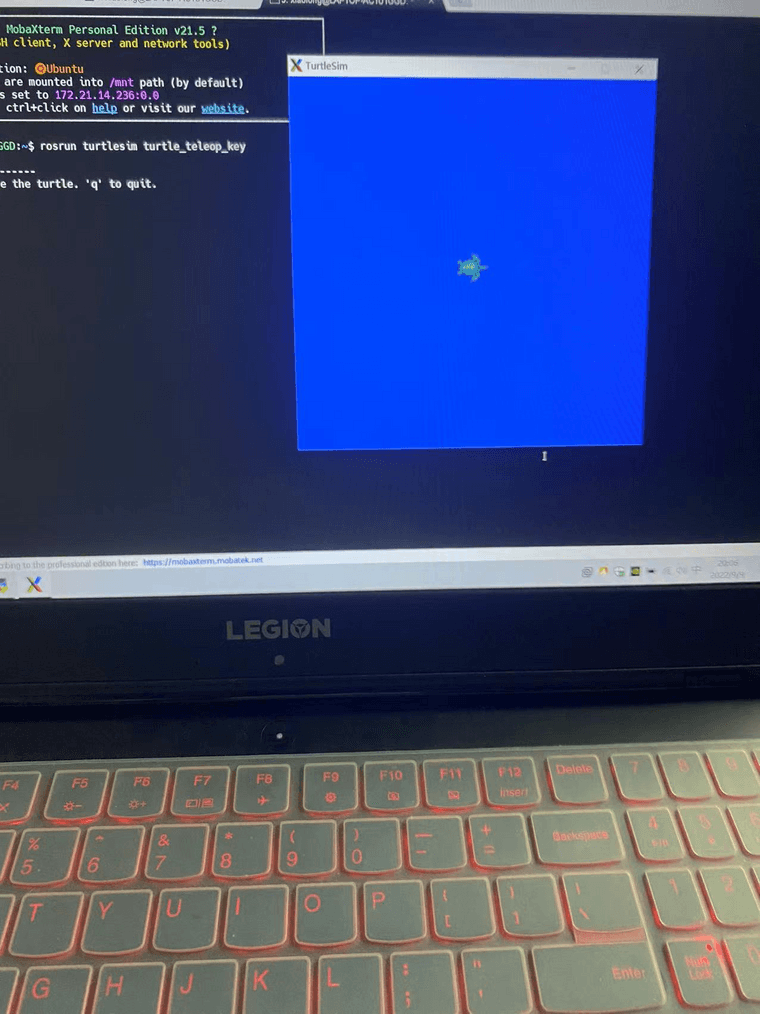
-
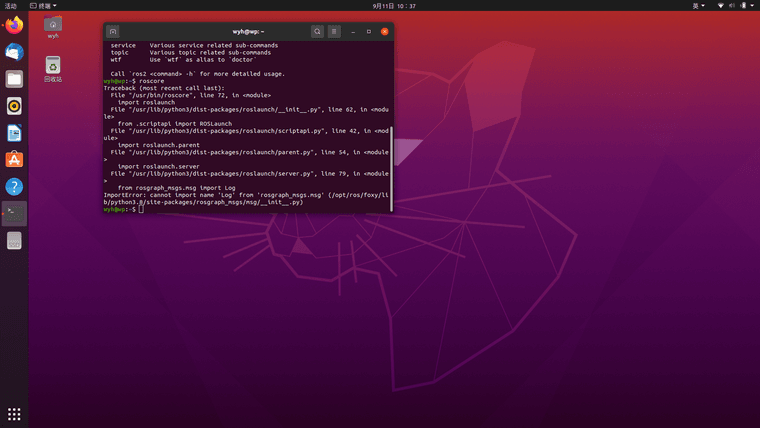
为什么roscore缺失 如何解决呢