ROS1 on Ubuntu 24.04 安装
-
在这里画个饼,目前已经编译了一半了。Ubuntu 22.04的ROS1是编译完成了,可以参考之前的帖子
进度截图:
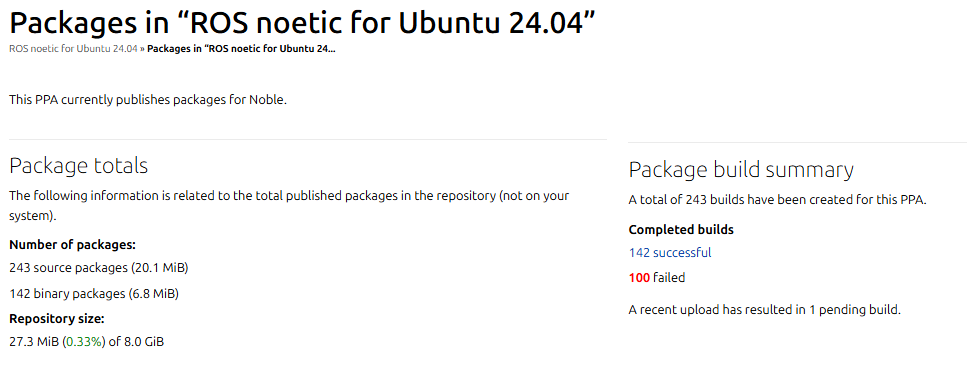
我难道就没有一段英勇,美好而又虚幻的过去……幸运地写在金叶片上?
-
@ganyuanzhen 填坑:
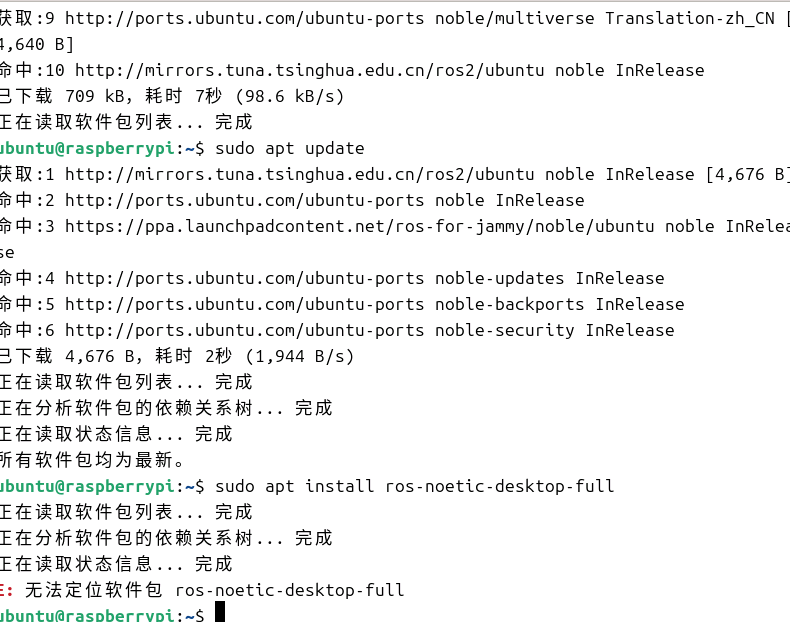
sudo add-apt-repository ppa:ros-for-jammy/noble sudo apt update sudo apt install ros-noetic-desktop-full -
@ganyuanzhen okok,不需要小伊回复的,在标签里加一个 noreplay 就可以了
-
@ganyuanzhen 填坑:
sudo add-apt-repository ppa:ros-for-jammy/noble sudo apt update sudo apt install ros-noetic-desktop-full -
 G ganyuanzhen 将这个主题标记为已解决,在
G ganyuanzhen 将这个主题标记为已解决,在
-
@ganyuanzhen 大佬你好,我执行完你这三句以后运行roscore并没有识别并运行,是还需要进行哪些编译步骤吗,运行环境Ubuntu24.04
-
@ganyuanzhen 刚刚翻了下您的历史帖子,这个内容的意思是已经解决了依赖和编译问题,只要安装noetic版本ROS就可以直接在Ubuntu24.04平台正常运行和使用了吗

-
@hnxczr 明白了,ROSWiki中有操作步骤,省去1-4步,直接从第五步设置环境继续就能启动roscore了,谢谢大佬分享!
-
 ]
]
大佬,按顺序执行后出现这个是为什么呢? -
@1527779127 我暂时没有编译arm版本的哈,

-
大佬 我这边在ubuntu24上源码编译ros1 noetic后,启动roscore卡住了... logging to /home/noetic/.ros/log/9d8fa6f0-2726-11f0-bfde-000c29129e95/roslaunch-noetic-ros1-3526.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
,这边用的是自带的python3.12,您这边编译用的是python3.10?之前我在上面部署了虚拟的python3.10,但是在编译qt_gui_core的时候包python_qt_binding中的pyqt5的版本和sip版本兼容老是有问题导致无法编译过 -
-
@darren_jetson 我有点记不清了,我当时debug是单独debug了roscore这个启动脚本,然后去看报错或者卡在那里了。如果你的环境改了的话,尝试自己debug找一下问题所在吧
-
@ganyuanzhen 大佬,有ARM版本的没有
-
@aimaker 暂时没有啊,抱歉