小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
[FishBot教程]4.使用ROS2键盘控制FishBot
-
@小鱼 鱼哥 虚拟机net不行吗,还是说要电脑开热点让小车连接
-
@2857589119 找客服要下视频,核心是小车可以把数据发送到serverip
-
@小鱼
 我换了电脑热点,也ping通了还是不行,连不上
我换了电脑热点,也ping通了还是不行,连不上 -
@andrew_liumuran 我的也没办法通信上,这个笔记本必须用有线连接吗,然后在开热点才能和小车通信吗
-
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
@suyelingfeng666 网络问题
-
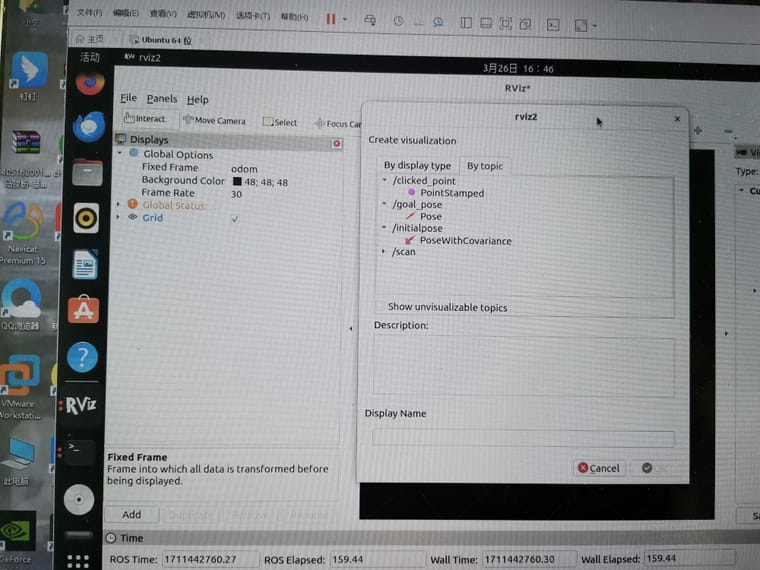 为什么改名为odom后,ADD选项里面没有这个选项呢?
为什么改名为odom后,ADD选项里面没有这个选项呢? -
@2916186745 Agent有没有连接上呢
-
@小鱼 agent连接成功了,也可以用键盘控制小车,但还是 ros2 topic echo /odom
WARNING: topic [/odom] does not appear to be published yet
Could not determine the type for the passed topic -
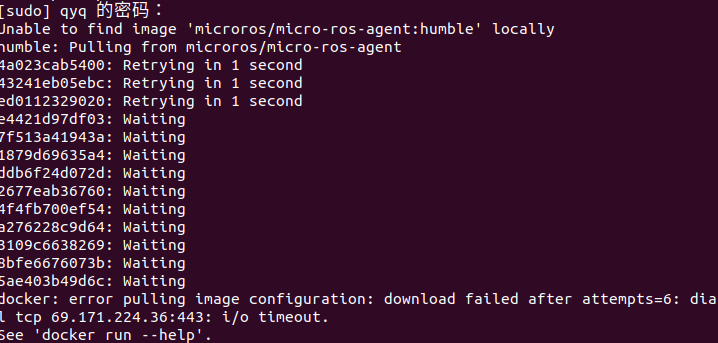
@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
启动mircoros失败,docker拉去不下来,网络是好的,其它也可以拉取,使用的是虚拟机22.04系统
-
-
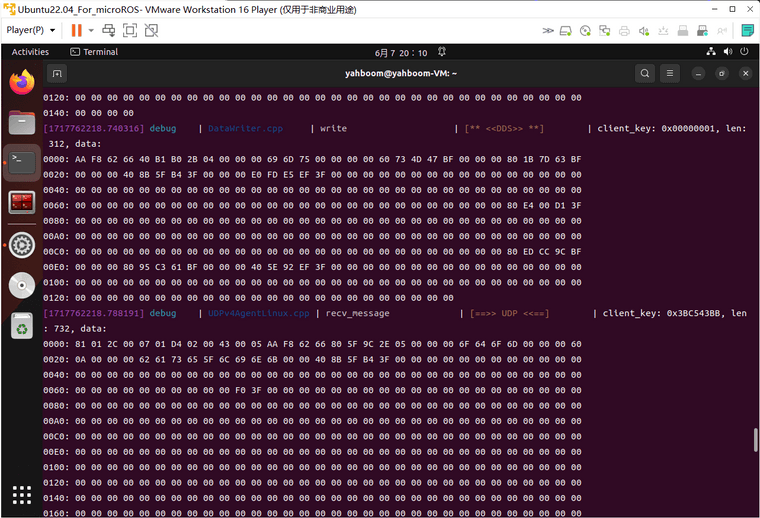
如图,开启microROS代理之后,只有这两种信息,采用台式机+虚拟机的方式,电脑和esp都通过无线方式连接到wifi。可以ping通esp主板,开启键盘结点后只能增减速度,无法控制其运动
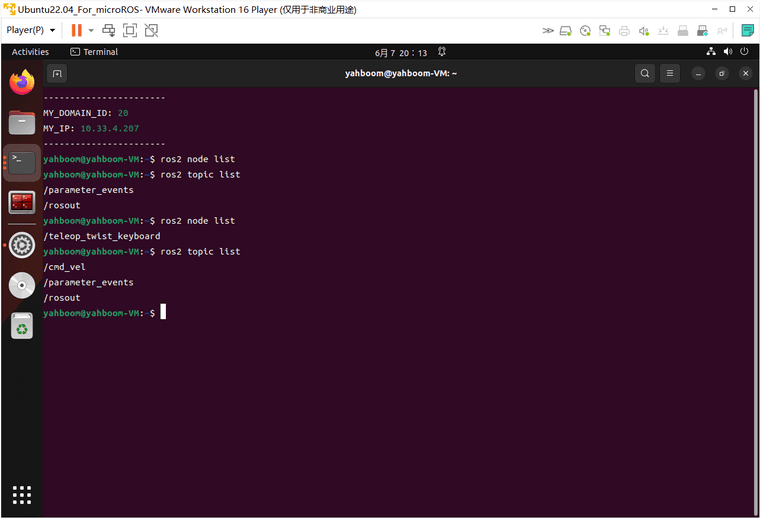
结点和话题清单如图所示 -
@1141682555 你图里的DOMAIN_ID是什么东西,为什么是20,大概率是虚拟机系统问题。
-

wifi连接成功了,但是打开之后一直卡在这里不动。@小鱼 -
@wushengxin https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答
网络结构是怎么样的呢,各个设备的ip是什么呢
-
@小鱼
输入:docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6(烧录配置之后运行McroRos服务失败)输出:[1726127984.634142] info | UDPv4AgentLinux.cpp | init | running... | port: 8888
[1726127984.635279] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 6我遇到了一些意外行为,反映在只显示前两行,并无数据传送,打开ros2话题并无话题发布。
背景:
设备:笔记本
网络:笔记本连接的实验室wifi
环境:使用的虚拟机,没有采用桥接模式(采用桥街模式好像就没网路了)下载和烧录都一切正常,首次刷新配置时会显示端口异常被占用,二次刷新后配置显示正常,连接wifi正常。ping小车的ip地址也可以联通。
测试:
1.对于端口占用问题,采用了方法1禁用端口指令,有回应。
2.网络问题,已经处于同一子网下可以ping通,但是电脑小车无法通信。问题:
是否要给电脑连接网线,采用桥接才可以解决。如果有人能够解释为什么会发生这种情况,或者我的理解有误,我将非常感激!