[FishBot教程]9.0.4.使用ROS2键盘控制FishBot
-
此回复已被删除! -
此回复已被删除! -
@suyelingfeng666 网络问题
-
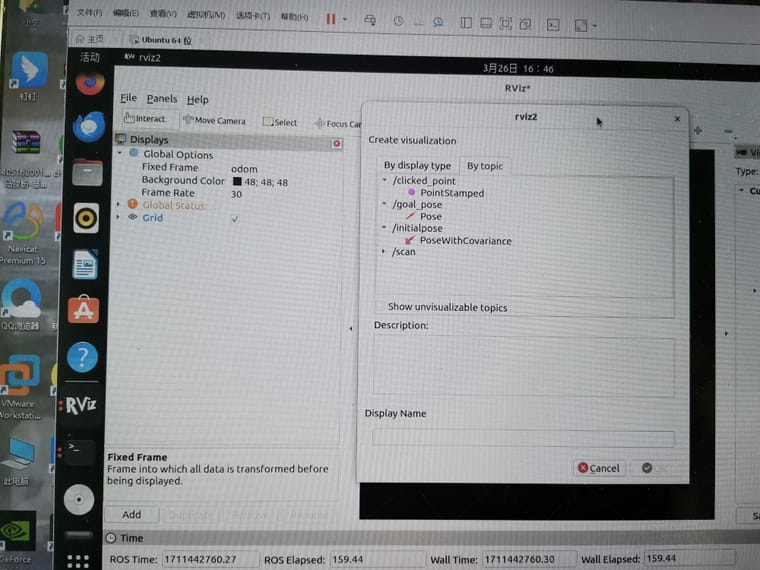 为什么改名为odom后,ADD选项里面没有这个选项呢?
为什么改名为odom后,ADD选项里面没有这个选项呢? -
@2916186745 Agent有没有连接上呢
-
@小鱼 agent连接成功了,也可以用键盘控制小车,但还是 ros2 topic echo /odom
WARNING: topic [/odom] does not appear to be published yet
Could not determine the type for the passed topic -
@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
启动mircoros失败,docker拉去不下来,网络是好的,其它也可以拉取,使用的是虚拟机22.04系统
-
-
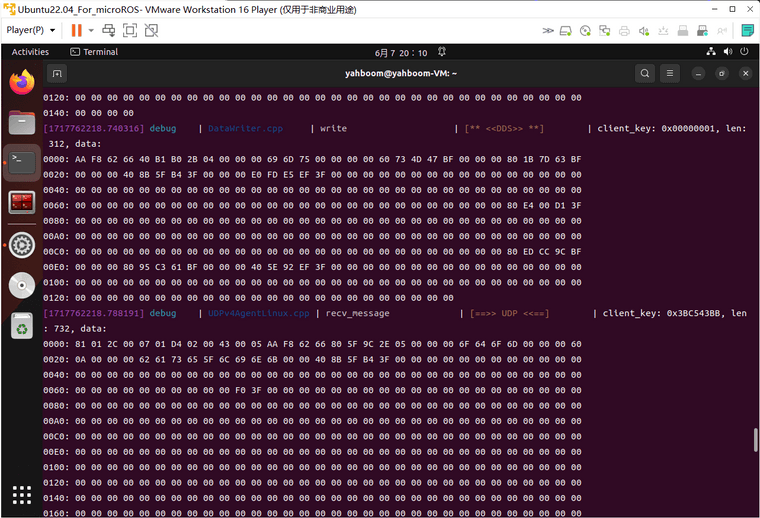
如图,开启microROS代理之后,只有这两种信息,采用台式机+虚拟机的方式,电脑和esp都通过无线方式连接到wifi。可以ping通esp主板,开启键盘结点后只能增减速度,无法控制其运动
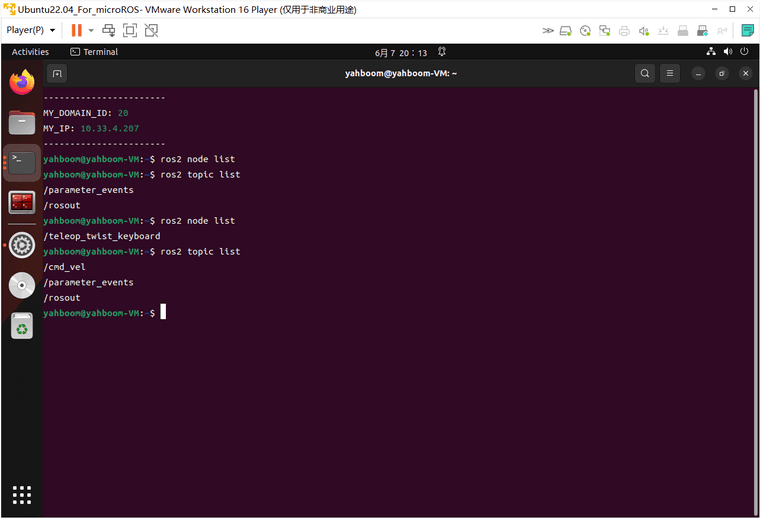
结点和话题清单如图所示 -
@1141682555 你图里的DOMAIN_ID是什么东西,为什么是20,大概率是虚拟机系统问题。
-

wifi连接成功了,但是打开之后一直卡在这里不动。@小鱼 -
@wushengxin https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答
网络结构是怎么样的呢,各个设备的ip是什么呢
-
@小鱼
输入:docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6(烧录配置之后运行McroRos服务失败)输出:[1726127984.634142] info | UDPv4AgentLinux.cpp | init | running... | port: 8888
[1726127984.635279] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 6我遇到了一些意外行为,反映在只显示前两行,并无数据传送,打开ros2话题并无话题发布。
背景:
设备:笔记本
网络:笔记本连接的实验室wifi
环境:使用的虚拟机,没有采用桥接模式(采用桥街模式好像就没网路了)下载和烧录都一切正常,首次刷新配置时会显示端口异常被占用,二次刷新后配置显示正常,连接wifi正常。ping小车的ip地址也可以联通。
测试:
1.对于端口占用问题,采用了方法1禁用端口指令,有回应。
2.网络问题,已经处于同一子网下可以ping通,但是电脑小车无法通信。问题:
是否要给电脑连接网线,采用桥接才可以解决。如果有人能够解释为什么会发生这种情况,或者我的理解有误,我将非常感激!
-
-
此回复已被删除! -
@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
,并成功接入了ROS2,本节我们尝试使用RVIZ2查看
@229102432 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
前进后退以及停止都不会响应,
这个代码在哪里修改呀
-
@229102432 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
/cmd_vel geometry_msgs/msg
我也是差不多的问题,通过键盘来进行控制的时候,只能一个轮子旋转 无法实现前进后退
-
@小鱼 你好我的小车按键没反应
-
-
@小鱼
小车按键没反应前进后退左右转都没有反应网络能ping通wanghuan@wanghuan-virtual-machine:~/桌面$ ros2 run teleop_twist_keyboard teleop_twist_keyboard This node takes keypresses from the keyboard and publishes them as Twist/TwistStamped messages. It works best with a US keyboard layout. --------------------------- Moving around: u i o j k l m , . For Holonomic mode (strafing), hold down the shift key: --------------------------- U I O J K L M < > t : up (+z) b : down (-z) anything else : stop q/z : increase/decrease max speeds by 10% w/x : increase/decrease only linear speed by 10% e/c : increase/decrease only angular speed by 10% CTRL-C to quit currently: speed 0.5 turn 1.0 currently: speed 0.55 turn 1.0 currently: speed 0.6050000000000001 turn 1.0 currently: speed 0.6655000000000002 turn 1.0 currently: speed 0.5989500000000002 turn 1.0 currently: speed 0.5390550000000002 turn 1.0 currently: speed 0.4851495000000002 turn 1.0 currently: speed 0.4366345500000002 turn 1.0 currently: speed 0.39297109500000016 turn 1.0 currently: speed 0.3536739855000002 turn 1.0 currently: speed 0.3183065869500002 turn 1.0 currently: speed 0.35013724564500026 turn 1.0 currently: speed 0.38515097020950034 turn 1.0 currently: speed 0.4236660672304504 turn 1.0 currently: speed 0.4660326739534955 turn 1.0 currently: speed 0.5126359413488452 turn 1.0