小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
[FishBot教程]7. FishBot-Nav2导航测试
-
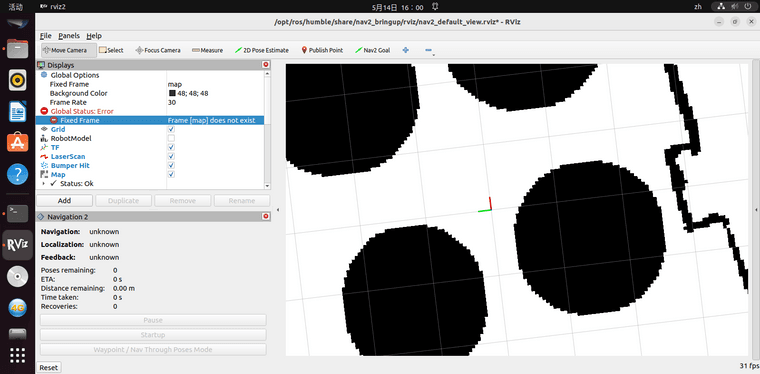
这里使用的是fishbot套件,并使用官方提供完整代码,但是在导航过程中出现问题,这里我在导航设置小车位置的过程点击 2F Point Estimate 设置点和方向之后,还是没有反应,无法进行导航,好像是没有设置成功,该怎么解决
-
@1683127550 让你发贴的原因是,我需要确认更多的信息
终端日志
系统版本
ROS版本
代码版本
前后操作
甚至网络环境
节点运行关系图
这些才能判断出问题,不然仅靠一张图再牛的人也没办法,还请理解小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
此回复已被删除! -
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 使用的是ubuntu22,ROS2版本是humble,在烧录成功之后直接按照网站上的步骤进行操作的,从头到尾
这几步按顺序做的,但是我在建图之后,用ps将地图修改了一下,然后就直接启动雷达并进行导航,这里出现了导航那里失败了

在导航过程中出现问题,这里我在导航设置小车位置的过程点击 2F Point Estimate 设置点和方向之后,还是没有反应,无法进行导航,好像是没有设置成功,该怎么解决
这里网络环境测试没有问题,代码就是上面步骤里面的代码连接直接下载的 -
@1683127550 终端日志,代码版本,节点运行关系图
另外请单独发帖!!!! -
鱼哥 安装依赖的时候出的这个问题
ERROR: the following packages/stacks could not have their rosdep keys resolved to system dependencies: fishbot_description: Cannot locate rosdep definition for [ament_python] Continuing to install resolvable dependencies... #All required rosdeps installed successfully -
此回复已被删除! -
@2496480233 然后colcon build报错
Starting >>> fishbot_bringup Starting >>> fishbot_cartographer Finished <<< fishbot_cartographer [0.12s] Starting >>> fishbot_description Finished <<< fishbot_bringup [0.31s] Starting >>> fishbot_interfaces --- stderr: fishbot_interfaces CMake Error at /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:240 (list): list index: 1 out of range (-1, 0) Call Stack (most recent call first): CMakeLists.txt:29 (rosidl_generate_interfaces) CMake Error at /opt/ros/humble/share/rosidl_generator_c/cmake/rosidl_generator_c_generate_interfaces.cmake:69 (message): Target dependency '/fishbot/build/fishbot_interfaces/rosidl_adapter/fishbot_interfaces/srv/FishBotConfig.idl' does not exist Call Stack (most recent call first): /opt/ros/humble/share/ament_cmake_core/cmake/core/ament_execute_extensions.cmake:48 (include) /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:286 (ament_execute_extensions) CMakeLists.txt:29 (rosidl_generate_interfaces) --- Failed <<< fishbot_interfaces [0.30s, exited with code 1] Aborted <<< fishbot_description [0.63s] Summary: 2 packages finished [0.89s] 1 package failed: fishbot_interfaces 1 package aborted: fishbot_description 2 packages had stderr output: fishbot_description fishbot_interfaces 1 package not processed -
鱼哥,我在第一步的时候遇到这个问题,请问怎么解决?
ERROR: the following rosdeps failed to install
apt: command [sudo -H apt-get install -y ros-foxy-robot-localization] failed
apt: Failed to detect successful installation of [ros-foxy-robot-localization] -
鱼哥第一步就出现错误
升级了 0 个软件包,新安装了 5 个软件包,要卸载 0 个软件包,有 21 个软件包未被升级。
需要下载 6,091 kB/7,470 kB 的归档。
解压缩后会消耗 54.5 MB 的额外空间。
错误:1 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu focal/main amd64 ros-foxy-diagnostic-updater amd64 3.1.0-2focal.20230317.013548
404 Not Found [IP: 101.6.15.130 80]
错误:2 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu focal/main amd64 ros-foxy-robot-localization amd64 3.1.2-1focal.20230317.014536
404 Not Found [IP: 101.6.15.130 80]
E: 无法下载 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu/pool/main/r/ros-foxy-diagnostic-updater/ros-foxy-diagnostic-updater_3.1.0-2focal.20230317.013548_amd64.deb 404 Not Found [IP: 101.6.15.130 80]
E: 无法下载 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu/pool/main/r/ros-foxy-robot-localization/ros-foxy-robot-localization_3.1.2-1focal.20230317.014536_amd64.deb 404 Not Found [IP: 101.6.15.130 80]
E: 有几个软件包无法下载,要不运行 apt-get update 或者加上 --fix-missing 的选项再试试?
ERROR: the following rosdeps failed to install
apt: command [sudo -H apt-get install -y ros-foxy-robot-localization] failed
apt: Failed to detect successful installation of [ros-foxy-robot-localization] -
@1436893633 sudo apt update ,另外不要使用 foxy版本,请切换humble版本,ubuntu22.04
-
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
@小鱼
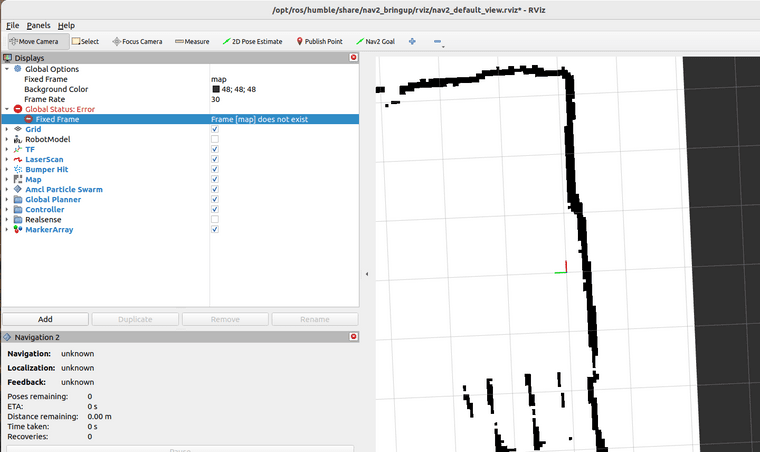
显示图像之后用2D Pose Estimate 选方向之后没有反映,而且全局代价地图和激光地图没有出现
雷达驱动还出现这个警告:
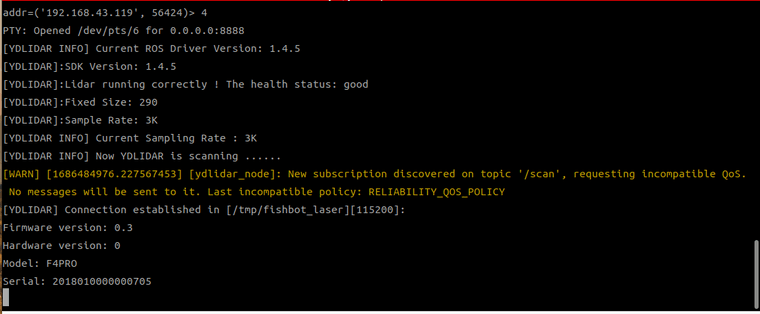
-
请单独发帖
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼 鱼哥在构建完地图导航测试时遇到了一点问题,问题如下:
平台:Ubuntu20.04 ROS:FOXY 小车:fishbot四驱
问题:地图成功构建好后,按照教程加载到navigation2.launch.py程序中去,编译成功,然后运行后,按照问档设置起点和目标点,无法使小车导航移动。具体操作步骤和执行状态如下:
1、启动micro-ros命令:
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
状态正常,可以接收到话题
2、启动雷达驱动:
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 fishros2/fishbot_laser
在新开的RVIZ中可以看到雷达正常工作。
3、修改navigation2.launch.py程序,加载新建的地图
4、运行程序,加载地图如下
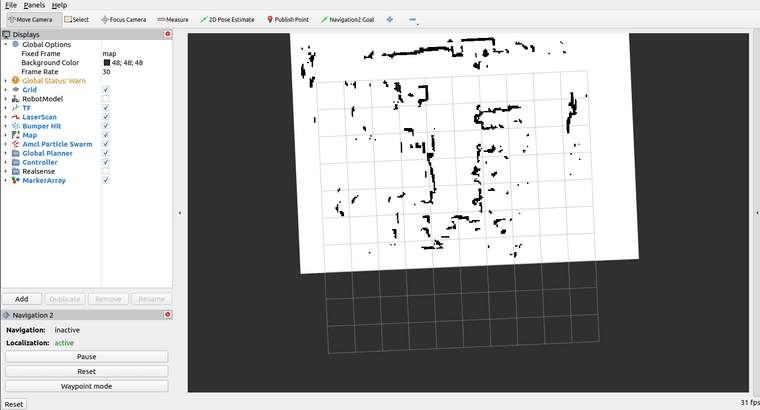
5、设置2D Pose Estimate 和 nav2 goal提示错误:
[amcl-2] [INFO] [1686665863.510768999] [amcl_rclcpp_node]: Message Filter dropping message: frame 'laser_frame' at time 1686665862.260 for reason 'Unknown'
[rviz2-10] [INFO] [1686665863.524613593] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1686665862.260 for reason 'Unknown'
[amcl-2] [INFO] [1686665863.635999865] [amcl_rclcpp_node]: Message Filter dropping message: frame 'laser_frame' at time 1686665862.386 for reason 'Unknown'
[rviz2-10] [INFO] [1686665863.652530977] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1686665862.386 for reason 'Unknown'
不知道问题出在了哪里? -
@1250372262 你好,你这个我问题解决了吗,我的也是地图可以加载,但2D Pose Estimate没有反应,也不能导航。
-
此回复已被删除!