@小鱼 谢谢,解决了
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2567524644 发布的最新帖子
-
RE: 『求助』发布在 硬件系统
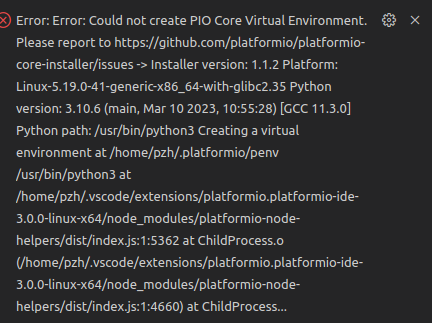
@小鱼 系统版本ubuntu22.04LTS,ROS2-humble版本,安装了PlatformIO插件,点击open,一直显示loading,报了如下错误:
Error: Error: Could not create PIO Core Virtual Environment. Please report to https://github.com/platformio/platformio-core-installer/issues -> Installer version: 1.1.2 Platform: Linux-5.19.0-41-generic-x86_64-with-glibc2.35
Python version: 3.10.6 (main, Mar 10 2023, 10:55:28) [GCC 11.3.0]
Python path: /usr/bin/python3
Creating a virtual environment at /home/pzh/.platformio/penv
/usr/bin/python3 at /home/pzh/.vscode/extensions/platformio.platformio-ide-3.0.0-linux-x64/node_modules/platformio-node-helpers/dist/index.js:1:5362
at ChildProcess.o (/home/pzh/.vscode/extensions/platformio.platformio-ide-3.0.0-linux-x64/node_modules/platformio-node-helpers/dist/index.js:1:4660)
at ChildProcess... -
运行colcon build --packages-up-to fishbot_navigation2报错发布在 Nav2
colcon build --packages-up-to fishbot_navigation2出现如下错误,请问是怎么回事?
usage: colcon [-h] [--log-base LOG_BASE] [--log-level LOG_LEVEL] {build,test,test-result} ...
colcon: error: unrecognized arguments: --packages-up-to fishbot_navigation2 -
【求助】发布在 Nav2
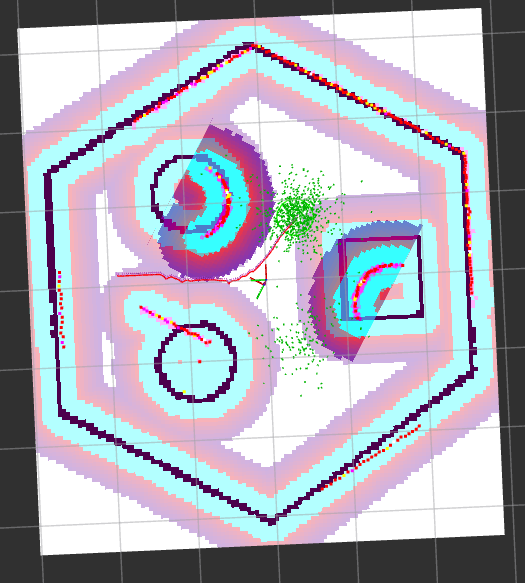
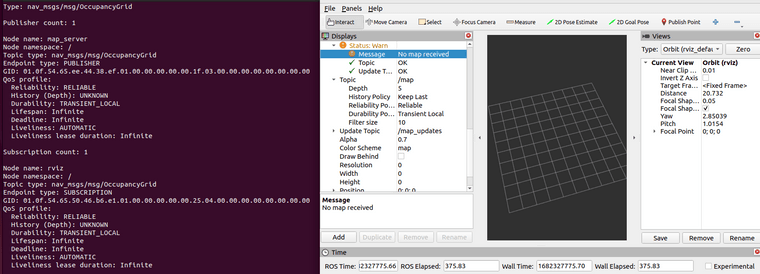
1.使用nav2_map_server加载保存的地图,终端启动rviz2,但是在add->by topic->并没有看见map组件,请问这是什么原因?
2.配置map_server,输入ros2 lifecycle set /map_server configure,结果Transitioning failed,并出现:
[ERROR] [1682262601.128957222] []: Caught exception in callback for transition 10
[ERROR] [1682262601.128998712] []: Original error: parameter 'yaml_filename' is not initialized
[WARN] [1682262601.129060729] []: Error occurred while doing error handling.
[FATAL] [1682262601.129091590] [map_server]: Lifecycle node map_server does not have error state implemented
 )
)