Moveit,IkFast运动学插件配置,最详细,没有之一
-
顺带贴一下chatgpt的说明:
xhost + && sudo docker run -it --rm -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -v pwd:pwd -w pwd fishros2/openrave这个命令用于在Docker容器中启动一个OpenRAVE环境。让我逐步解释每个部分的含义: xhost +:该命令允许X服务器接受来自任何主机的连接。这是为了确保Docker容器可以连接到主机的图形界面。 sudo docker run:这是docker命令的一部分,用于运行一个新的容器。 -it:这个选项允许您与容器进行交互,同时保持标准输入输出通道打开。 --rm:这个选项告诉Docker在容器停止后自动删除它,以防止容器文件堆积。 -v /tmp/.X11-unix:/tmp/.X11-unix:这个选项将主机的X11 UNIX套接字目录映射到容器的相同目录,以便容器可以连接到主机的X服务器。 --device /dev/snd:这个选项将主机的音频设备映射到容器,使容器能够访问主机的音频。 -e DISPLAY=unix$DISPLAY:这个选项将主机的Display环境变量传递给容器,以便容器可以将GUI显示到主机的屏幕上。 -v pwd:pwd``:这个选项将当前工作目录挂载到容器的相同目录中,以便容器可以访问主机上的文件。 -w pwd``:这个选项将容器的工作目录设置为当前工作目录。 fishros2/openrave:这是Docker镜像的名称,其中包含了OpenRAVE环境。 通过执行这个命令,您将能够在Docker容器中运行OpenRAVE,同时能够在主机上查看和控制OpenRAVE的图形界面。所以在exit退出镜像之后,容器就没了,之前的工作也没了,所以最好是去掉-rm的命令,方便下次再进来不用再配置
-
高兴早了,编译成功但是tm没有install文件夹!!!!

起猛了!!! 忘了ros1的source是
source devel/setup.bash -
@2756819228 我也是!请问你的怎么解决的啊?
-
配置成功!
那些catkin_make报错的,把缺少的相对应的包下载就好了 -
@2756819228 sudo apt-get install ros-noetic-rviz-visual-tools
-
@小鱼 在 Moveit,IkFast运动学插件配置,最详细,没有之一 中说:
xhost + && sudo docker run -it --rm -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -v
pwd:pwd-wpwdfishros2/openrave 图片地址)址)找不到docker命令
图片地址)址)找不到docker命令 -
找不到docker命令是为和呀
-
@3331616193 我的跑通了,鱼哥牛的,遇到问题可以戳我 地址)
地址) -
@小鱼 鱼哥,这个是只能用于elite_robot 这个机械臂吗,还是把机械臂模型dae文件改成其他的也能用
-
@2537563106 成功了,步骤1.3里面把工作空间改成自己的机械臂就行了,之后的每一步的机器人名字也改成自己的
-
此回复已被删除! -
@2537563106 你好,大佬求解出来ur5的IKFAST文件有问题吗?我的IKFAST的cpp文件只有1k多行,和github上的代码差别很大
-
https://www.hamzamerzic.info/ikfast_generator/
使用以上的链接好像可以直接生成IKFAST的cpp文件

知乎上面的教程如下:
https://zhuanlan.zhihu.com/p/670483129 -
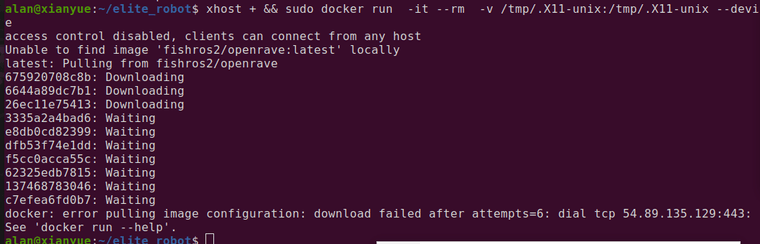
@3331616193 我的也找不到dockerUnable to find image 'fishros2/openrave:latest' locally,
docker-compose --versionCommand 'docker-compose' not found, but can be installed with:
sudo snap install docker # version 24.0.5, or
sudo apt install docker-compose # version 1.25.0-1
老哥,咋解决的呢 -
@小鱼
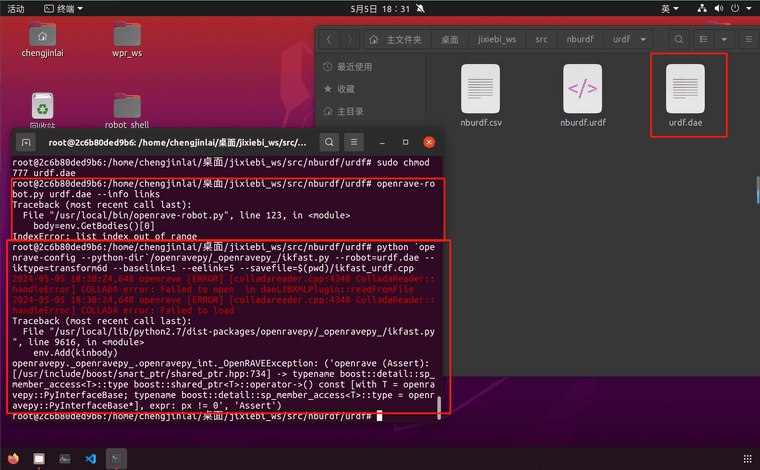
想请教下各位大佬,20版本用鱼哥的docker镜像配置ikfast插件,依赖都装了,编译没问题,dae文件也能生成,精度设的小数点后3位,但到生成ikfast代码时候会报错,然后我往前一步执行
openrave-robot.py urdf.dae --info links
查看链接关系也会报错,报错内容似乎是dae没加载进去,但我已经给chmod访问权限了,想了很久不知道啥原因,求大佬指教 -
2 2386884119 在 中 引用了 这个主题
-
博主您好,现在docker没法拉取镜像了,可以用百度网盘或者其他方式分享一下镜像文件吗?
-
 请问这个问题怎么解决雅?
请问这个问题怎么解决雅? -
@3111801504 一键安装docker代理
-
鱼哥,ikfst不是能生成7轴的逆运动学吗?为何在生成CPP时,我将命令调成了9个link就会报错?
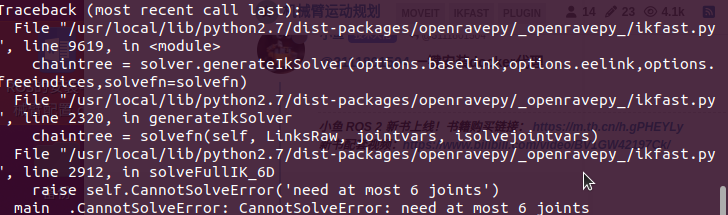
命令是python
openrave-config --python-dir/openravepy/openravepy/ikfast.py --robot=mxarm.dae --iktype=transform6d --baselink=1 --eelink=9 --savefile=$(pwd)/ikfastmx.cpp -
@2756819228 我这里是最后添加了 --net=host 让容器中的网络模式改成host,共享主机的网络环境。