[FishBot教程]9.0.7. FishBot-Nav2导航测试
-
无法下载cartographer和navigation源码,自己手动下载后,又无法编译cartographer源码
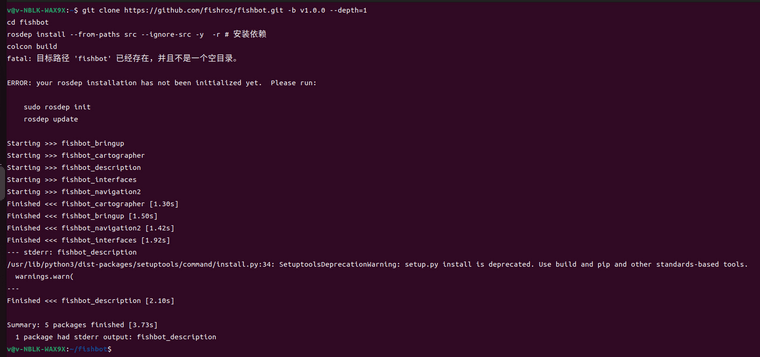
使用git clone --recursive https://github.com/fishros/fishbot.git -b v1.0.0 --depth=1
cd fishbot
rosdep install --from-paths src --ignore-src -y -r # 安装依赖
colcon build下载源码,无法下载cartographer和navigation源码,(我得环境是vm虚拟机+ubuntu22.04+ros2 humble版本)
报错 重定向:http://ww3.91chi.fun/?sub1=90563160-ae8f-11ee-b3d1-c2900044a4dd
fatal: 无法克隆 'https://github.91chi.fun/https://github.com/ros2/cartographer.git' 到子模组路径 '/home/zlkj/Desktop/gong_xiang/yuan_ma1/fishbot/src/cartographer_code/cartographer'
克隆 'src/cartographer_code/cartographer' 失败。按计划重试
正克隆到 '/home/zlkj/Desktop/gong_xiang/yuan_ma1/fishbot/src/cartographer_code/cartographer_ros'...
warning: 您似乎克隆了一个空仓库。
正克隆到 '/home/zlkj/Desktop/gong_xiang/yuan_ma1/fishbot/src/navigation'...
warning: 您似乎克隆了一个空仓库。
正克隆到 '/home/zlkj/Desktop/gong_xiang/yuan_ma1/fishbot/src/cartographer_code/cartographer'...
warning: 您似乎克隆了一个空仓库。
error: inflate: data stream error (incorrect header check)
error: File 2ce33a65bd4e41e3bf5af92c9275354ce7921c70 (https://github.91chi.fun/https://github.com/ros2/cartographer.git/objects/2c/e33a65bd4e41e3bf5af92c9275354ce7921c70) corrupt
error: Unable to find 2ce33a65bd4e41e3bf5af92c9275354ce7921c70 under https://github.91chi.fun/https://github.com/ros2/cartographer.git
Cannot obtain needed object 2ce33a65bd4e41e3bf5af92c9275354ce7921c70
error: 获取失败。
fatal: 获取了子模组路径 'src/cartographer_code/cartographer',但是它没有包含 2ce33a65bd4e41e3bf5af92c9275354ce7921c70。直接获取该提交失败。
fatal:
2:后续自己手动下载这里两部分源码,在编译cartographer时候,报错:home/zlkj/Desktop/gong xiang/yuan ma/fishbot/src/cartographer_code/cartographercartographer/common/thread pool,h:73:63: error:"mutexhas not been declaredvoid NotifyDependenciesCompleted(Task* task) LOCKS EXCLUDED(mutex ) ov73erride;
home/zlkj/Desktop/gong xiang/yuan ma/fishbot/src/cartographer_code/cartographercartographer/common/thread pool.h:73:48: error: ISO C++ forbids declaration ofLOCKS EXCLUDED’ with no type [-fpermissive]73void NotifyDependenciesCompleted(Task* task) LOCKS_EXCLUDED(mutex ) override;
home/zlkj/Desktop/gong xiang/yuan ma/fishbot/src/cartographer_code/cartographercartographer/common/thread poolh:73:48: error: int cartographer::common::thredPool::LOCKS EXCLUDED(int)’ cannot be overloaded with "int cartographer::common::Threadpool::LOCKS EXCLUDED(int)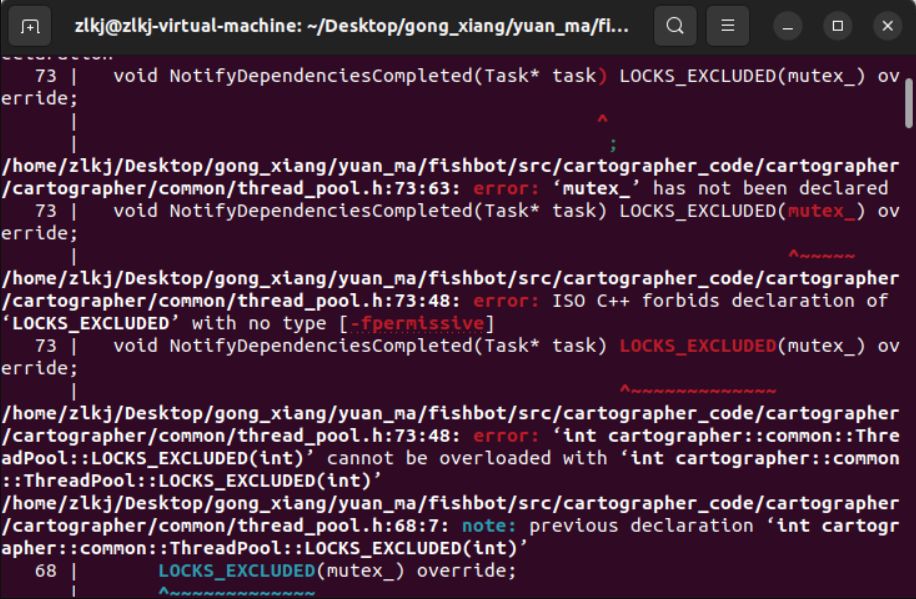
-
@429016267 源码版本有些老了,直接二进制安装吧
-
@小鱼 好吧,目前我就是源码编不过,其他都可以,有没有什么方案能解决下这个问题呢,大佬
-
@429016267 看d2lros2教程前面的仿真部分,根据提示重新从原来的仓库克隆
-
@小鱼 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
rosdep install --from-paths src --ignore-src -y -r # 安装依赖
在安装依赖时报错,
 用的ubuntu22.04 humble版本 然后图上的网址打不开。
用的ubuntu22.04 humble版本 然后图上的网址打不开。 -
-
-
鱼哥,这是什么问题
autoliu@autoliu-LEGION-REN7000K-26IRB:~/fishbot$ rosdep install --from-paths src --ignore-src -y -r # 安装依赖
#All required rosdeps installed successfully
autoliu@autoliu-LEGION-REN7000K-26IRB:~/fishbot$ colcon build
Starting >>> fishbot_bringup
Starting >>> fishbot_cartographer
Starting >>> fishbot_description
Starting >>> fishbot_interfaces
Starting >>> fishbot_navigation2
--- stderr: fishbot_cartographer
CMake Error at /usr/share/cmake-3.22/Modules/CMakeTestCCompiler.cmake:69 (message):
The C compiler"/usr/bin/cc"is not able to compile a simple test program.
It fails with the following output:
Change Dir: /home/autoliu/fishbot/build/fishbot_cartographer/CMakeFiles/CMakeTmp Run Build Command(s):/usr/bin/gmake -f Makefile cmTC_0c79a/fast && /usr/bin/gmake -f CMakeFiles/cmTC_0c79a.dir/build.make CMakeFiles/cmTC_0c79a.dir/build gmake[1]: 进入目录“/home/autoliu/fishbot/build/fishbot_cartographer/CMakeFiles/CMakeTmp” Building C object CMakeFiles/cmTC_0c79a.dir/testCCompiler.c.o /usr/bin/cc -o CMakeFiles/cmTC_0c79a.dir/testCCompiler.c.o -c /home/autoliu/fishbot/build/fishbot_cartographer/CMakeFiles/CMakeTmp/testCCompiler.c /home/autoliu/fishbot/build/fishbot_cartographer/CMakeFiles/CMakeTmp/testCCompiler.c:11:1: fatal error: error closing /tmp/cc76K2IV.s: 设备上没有空间 11 | { (void)argv; return argc-1;} | ^ compilation terminated. gmake[1]: *** [CMakeFiles/cmTC_0c79a.dir/build.make:78:CMakeFiles/cmTC_0c79a.dir/testCCompiler.c.o] 错误 1 gmake[1]: 离开目录“/home/autoliu/fishbot/build/fishbot_cartographer/CMakeFiles/CMakeTmp” gmake: *** [Makefile:127:cmTC_0c79a/fast] 错误 2CMake will not be able to correctly generate this project.
Call Stack (most recent call first):
CMakeLists.txt:2 (project)
Failed <<< fishbot_cartographer [0.39s, exited with code 1]
Aborted <<< fishbot_description [0.38s]
Aborted <<< fishbot_bringup [0.41s]
Aborted <<< fishbot_interfaces [0.49s]
Aborted <<< fishbot_navigation2 [0.48s]Summary: 0 packages finished [0.91s]
1 package failed: fishbot_cartographer
4 packages aborted: fishbot_bringup fishbot_description fishbot_interfaces fishbot_navigation2
4 packages had stderr output: fishbot_bringup fishbot_cartographer fishbot_interfaces fishbot_navigation2 -
鱼哥,如果我要自己写控制算法,应该在哪里改,没找到源码的控制算法在那里
-
@safereinforcementlab 我重新装了ros2,就好了
-
请问在这个程序里面,具体的控制算法程序在哪里,https://github.com/fishros/fishbot,没有看到
-
此回复已被删除! -
@小鱼
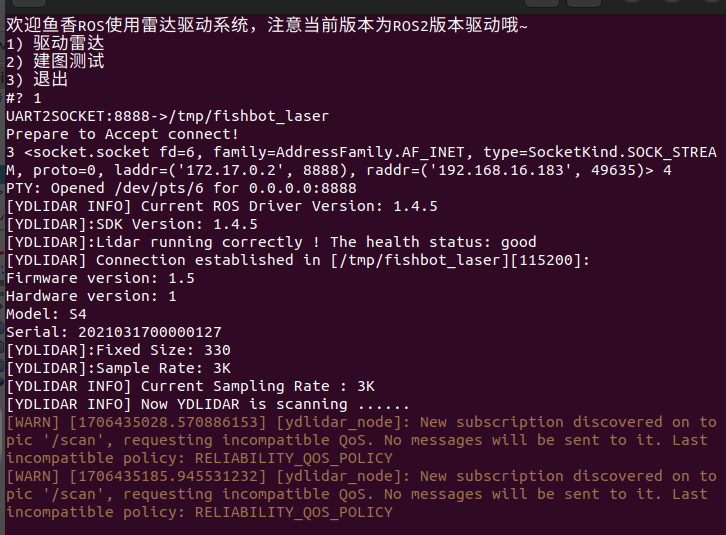
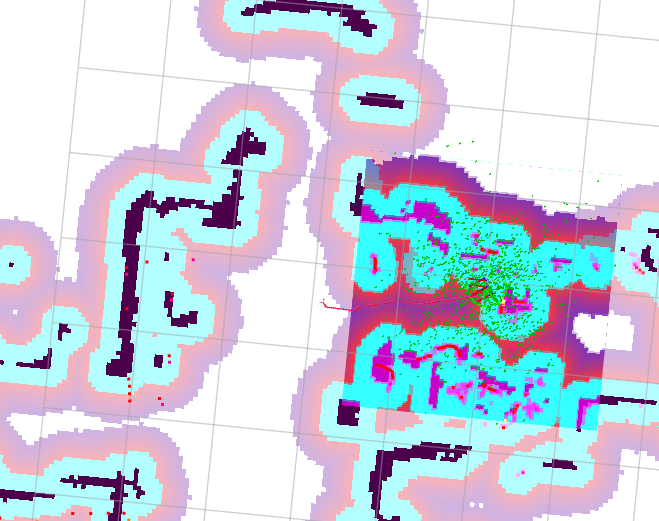
鱼哥 都做完了 最后给了小车目标之后 他只是转了个向 并没有移动 我看雷达这边报了警 是这个原因吗? 还是因为什么? -
@1147022743 这个警告没关系,是Qos 主要是你这膨胀半径太大了吧
-
@小鱼 鱼哥,我安装依赖是成功的,但是在编译的时候我也出现了这个问题,请问该怎么解决
-
@blairan121122885 解决了吗,跑了一次一键安装?
-
@192224801 同样问题解决了吗
-
@小鱼 鱼哥这一步跑一键安装,输入命令后安装第几项?
-
@小鱼
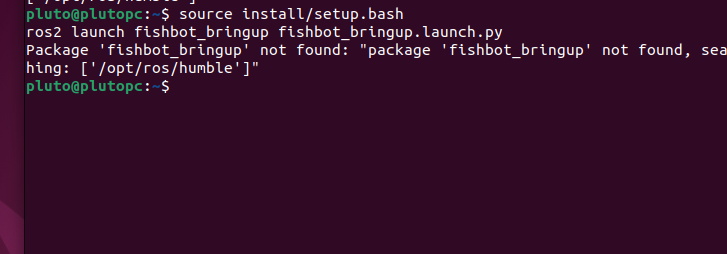
 鱼哥,卡在“fishbot_bringup”这里了,没找到如何解决的方法呢,帮我看看怎么个问题,多谢
鱼哥,卡在“fishbot_bringup”这里了,没找到如何解决的方法呢,帮我看看怎么个问题,多谢
-
我下载的NAV2的代码为什么编译阶段会报错
rclcpp::Node>; std::string = std::__cxx11::basic_string<char>]’: /home/tq/workspace/nav2/src/navigation2-main/nav2_util/src/lifecycle_service_client.cpp:35:3: required from here /home/tq/workspace/nav2/src/navigation2-main/nav2_util/include/nav2_util/service_client.hpp:49:15: error: cannot convert ‘rclcpp::SystemDefaultsQoS’ to ‘const rmw_qos_profile_t&’ {aka ‘const rmw_qos_profile_s&’} 49 | rclcpp::SystemDefaultsQoS(), | ^~~~~~~~~~~~~~~~~~~ | | | rclcpp::SystemDefaultsQoS In file included from /opt/ros/humble/include/rclcpp/rclcpp/node.hpp:1321, from /opt/ros/humble/include/rclcpp/rclcpp/executors/single_threaded_executor.hpp:28, from /opt/ros/humble/include/rclcpp/rclcpp/executors.hpp:22, from /opt/ros/humble/include/rclcpp/rclcpp/rclcpp.hpp:155, from /home/tq/workspace/nav2/src/navigation2-main/nav2_util/include/nav2_util/service_client.hpp:20, from /home/tq/workspace/nav2/src/navigation2-main/nav2_util/include/nav2_util/lifecycle_service_client.hpp:24, from /home/tq/workspace/nav2/src/navigation2-main/nav2_util/src/lifecycle_service_client.cpp:15: /opt/ros/humble/include/rclcpp/rclcpp/node_impl.hpp:127:29: note: initializing argument 2 of ‘typename rclcpp::Client<ServiceT>::SharedPtr rclcpp::Node::create_client(const string&, const rmw_qos_profile_t&, rclcpp::CallbackGroup::SharedPtr) [with ServiceT = lifecycle_msgs::srv::ChangeState; typename rclcpp::Client<ServiceT>::SharedPtr = std::shared_ptr<rclcpp::Client<lifecycle_msgs::srv::ChangeState> >; std::string = std::__cxx11::basic_string<char>; rmw_qos_profile_t = rmw_qos_profile_s; rclcpp::CallbackGroup::SharedPtr = std::shared_ptr<rclcpp::CallbackGroup>]’ 127 | const rmw_qos_profile_t & qos_profile, | ~~~~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~ In file included from /home/tq/workspace/nav2/src/navigation2-main/nav2_util/include/nav2_util/lifecycle_service_client.hpp:24, from /home/tq/workspace/nav2/src/navigation2-main/nav2_util/src/lifecycle_service_client.cpp:15: /home/tq/workspace/nav2/src/navigation2-main/nav2_util/include/nav2_util/service_client.hpp: In instantiation of ‘nav2_util::ServiceClient<ServiceT, NodeT>::ServiceClient(const string&, const NodeT&) [with ServiceT = lifecycle_msgs::srv::GetState; NodeT = std::shared_ptr<rclcpp::Node>; std::string = std::__cxx11::basic_string<char>]’: /home/tq/workspace/nav2/src/navigation2-main/nav2_util/src/lifecycle_service_client.cpp:36:3: required from here /home/tq/workspace/nav2/src/navigation2-main/nav2_util/include/nav2_util/service_client.hpp:49:15: error: cannot convert ‘rclcpp::SystemDefaultsQoS’ to ‘const rmw_qos_profile_t&’ {aka ‘const rmw_qos_profile_s&’} 49 | rclcpp::SystemDefaultsQoS(), | ^~~~~~~~~~~~~~~~~~~ | | | rclcpp::SystemDefaultsQoS In file included from /opt/ros/humble/include/rclcpp/rclcpp/node.hpp:1321, from /opt/ros/humble/include/rclcpp/rclcpp/executors/single_threaded_executor.hpp:28, from /opt/ros/humble/include/rclcpp/rclcpp/executors.hpp:22, from /opt/ros/humble/include/rclcpp/rclcpp/rclcpp.hpp:155, from /home/tq/workspace/nav2/src/navigation2-main/nav2_util/include/nav2_util/service_client.hpp:20, from /home/tq/workspace/nav2/src/navigation2-main/nav2_util/include/nav2_util/lifecycle_service_client.hpp:24, from /home/tq/workspace/nav2/src/navigation2-main/nav2_util/src/lifecycle_service_client.cpp:15: /opt/ros/humble/include/rclcpp/rclcpp/node_impl.hpp:127:29: note: initializing argument 2 of ‘typename rclcpp::Client<ServiceT>::SharedPtr rclcpp::Node::create_client(const string&, const rmw_qos_profile_t&, rclcpp::CallbackGroup::SharedPtr) [with ServiceT = lifecycle_msgs::srv::GetState; typename rclcpp::Client<ServiceT>::SharedPtr = std::shared_ptr<rclcpp::Client<lifecycle_msgs::srv::GetState> >; std::string = std::__cxx11::basic_string<char>; rmw_qos_profile_t = rmw_qos_profile_s; rclcpp::CallbackGroup::SharedPtr = std::shared_ptr<rclcpp::CallbackGroup>]’