拓展3:FishBot 树莓派配置建图导航
-
-
@小鱼 搞定了谢谢,我电脑重启重走了一遍流程就好了
估计是哪里疏忽了
中文互联网最牛逼的ros2教程 -
请教一下在ssh里想要打开rviz2在远程控制屏幕的命令应该怎么写,
尝试用Xmanager打开配置助手但是在xhost命令在执行之后终端一点返回没有 -
@1904688138 这个很麻烦,而且带宽堪忧,最好的办法是利用ros2的局域网自动发现,直接用本机的rviz2看远程数据
-
@小鱼 ros连接的那个机器显示有点不太一样,有没有什么好办法
-
这个教程支持树莓派上的galactic版本么?
-
@slxzj1990 没有测试过,理论上问题不大
-
鱼哥,建图如果要用IMU,这个IMU应该是需要标定的吧,标定的教程有么?@小鱼
-
@592976189 暂时没有哈
-
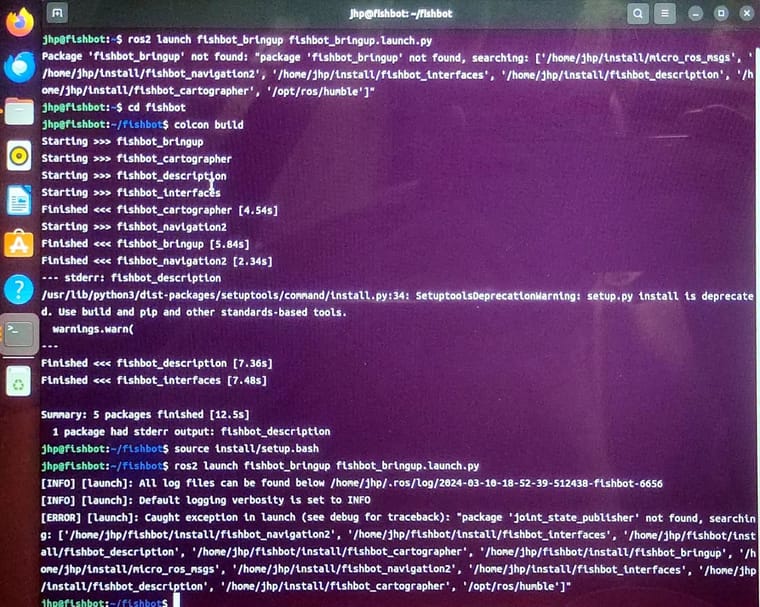
鱼哥,第二步说这个包有问题
-
@515261725 sudo apt install ros-$ROS_DISTRO-joint-state-publisher
-
此回复已被删除! -
@小鱼 这个命令还是这个报错,这个问题是pip版本太高了,回退就行了
-
鱼哥,我雷达和主控板都是通过串口与树莓派进行通信的,前几步都没问题,但是我运行ros2 launch slam_toolbox online_async_launch.py就一直出现这个问题,换成cartograph建图也是报错,能出现map,但是不是实时更新

-
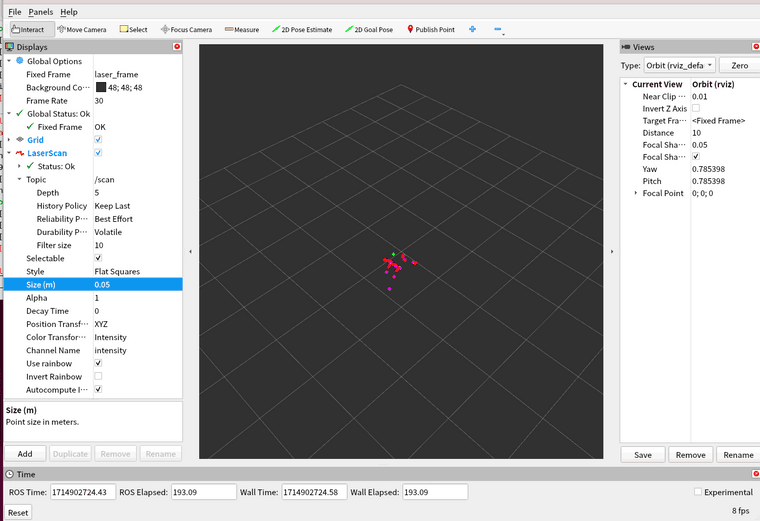
@2524167316
 出现的map是这样的,不能实时更新,不知道哪里出来问题
出现的map是这样的,不能实时更新,不知道哪里出来问题 -
@2524167316
 雷达能正常运行,但是死活就是不能建图
雷达能正常运行,但是死活就是不能建图 -
@2524167316 这个看起来是正常的,不出图检查下各个话题是否正常。另外告知下固件版本类型。
-
@小鱼 [async_slam_toolbox_node-1] [INFO] [1714996759.771290017] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1714996759.626 for reason 'discarding message because the queue is full'
我现在是用树莓派当上位机通过串口与主控板和雷达驱动板通信,树莓派用的是4b的,没有固件库,因为我没用wifi通信,一直报上面的错误 -
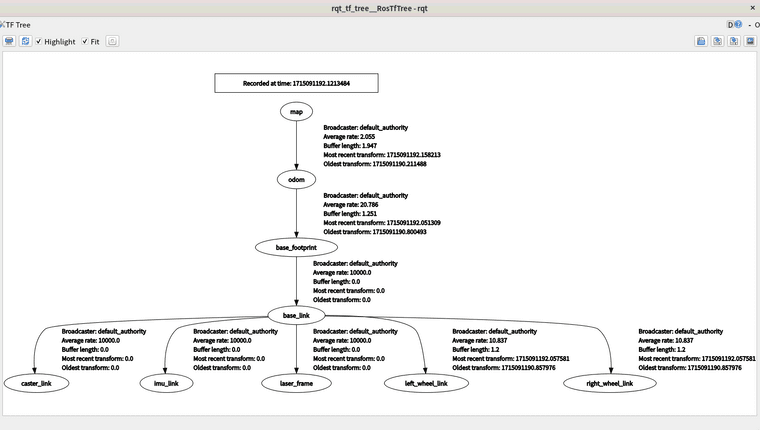
@2524167316 检查一下tf_tree
-
@小鱼
 之前发现/odom有话题,但是没有数据传过来,现在/odom有数据了,但是还是建不了图
之前发现/odom有话题,但是没有数据传过来,现在/odom有数据了,但是还是建不了图 -
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题