拓展3:FishBot 树莓派配置建图导航
-
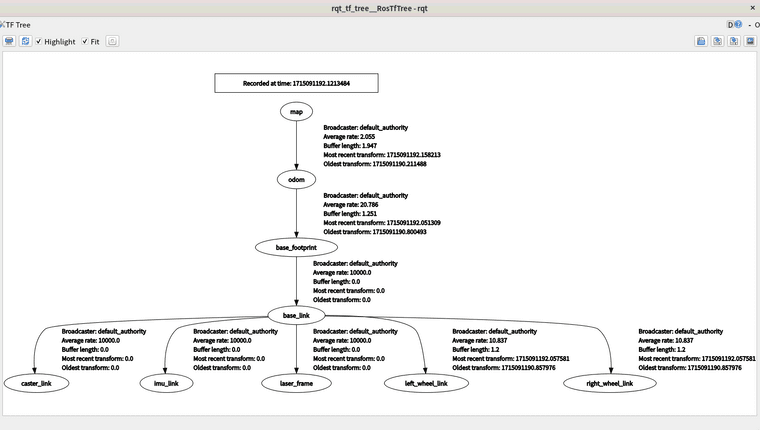
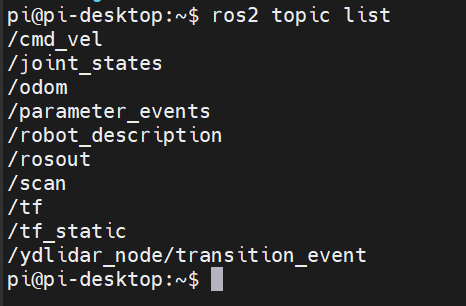
@2524167316 检查一下tf_tree
-
@小鱼
 之前发现/odom有话题,但是没有数据传过来,现在/odom有数据了,但是还是建不了图
之前发现/odom有话题,但是没有数据传过来,现在/odom有数据了,但是还是建不了图 -
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
@小鱼 在 拓展3:FishBot 树莓派配置建图导航 中说:
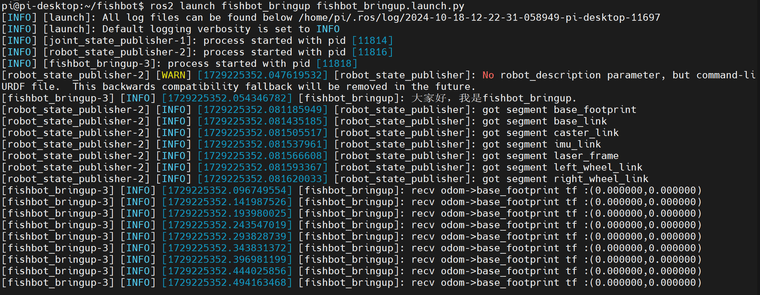
ros2 launch fishbot_bringup fishbot_bringup.launch.py
运行之后,出现以下错误:

打开rviz之后也没有小车模型,也没有RobotModel话题,请问怎么解决。 -
-
@小鱼 雷达和四驱板都已经成功运行,运行ros2 launch fishbot_bringup fishbot_bringup.launch.py后,输出如下:
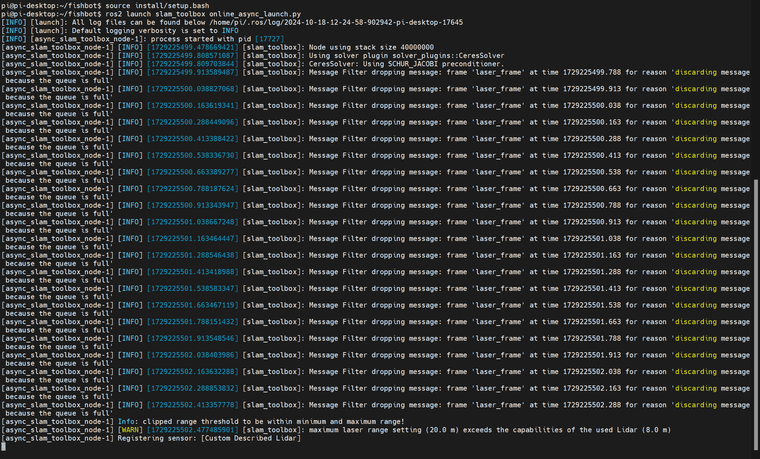
在进行建图操作时,输入ros2 launch slam_toolbox online_async_launch.py,输出如下:
在rviz中没有RobotModel话题:
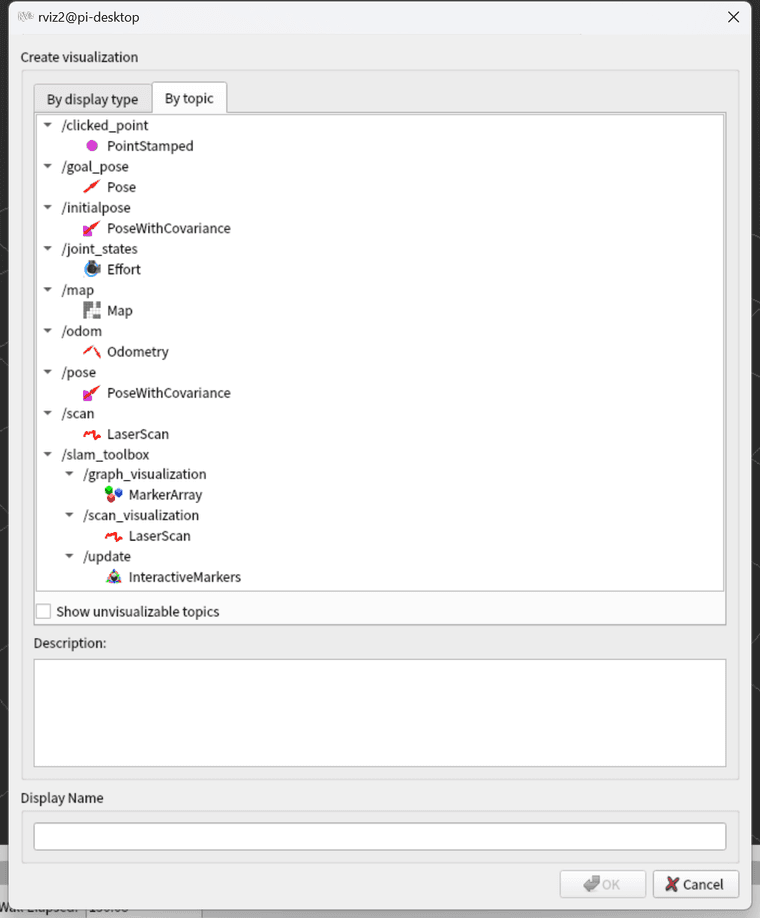
我是想要加载小车的模型在进行建图。 -
-
@小鱼
这样的
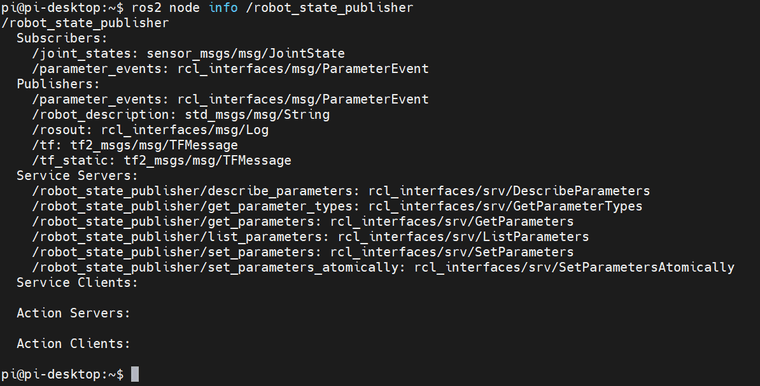
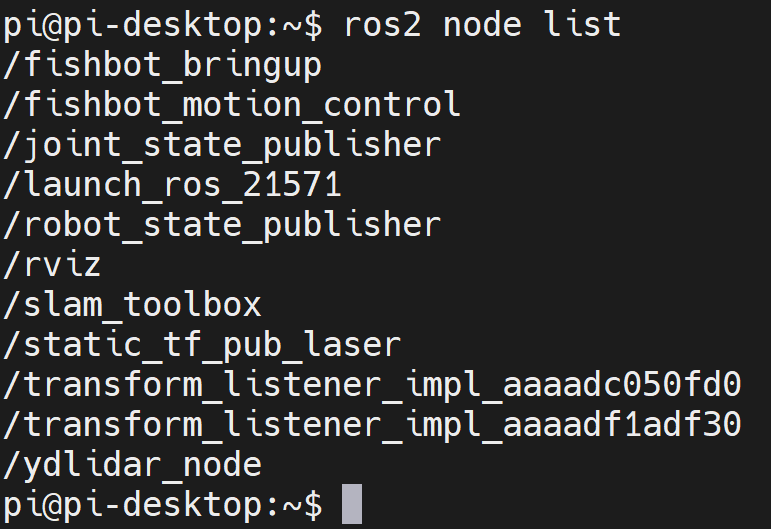
这是节点:
-
@小鱼 你把这个文件 ishbot_bringup.launch.py 的内容粘贴出来,另外不要截图:
@小鱼 在 提问前必看!不符合要求的问题拒绝回答!! 中说:
- 不要截图,要复制粘贴,一定要代码块包裹
不要截图的原因是,代码方便回答者去复制帮你搜索,而且无论是在手机上还是电脑上都更容易看。
- 不要截图,要复制粘贴,一定要代码块包裹
-
import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): package_name = 'fishbot_description' urdf_name = "fishbot_v1.0.0.urdf" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') robot_state_publisher_node = Node( package='robot_state_publisher', executable='robot_state_publisher', arguments=[urdf_model_path] ) joint_state_publisher_node = Node( package='joint_state_publisher', executable='joint_state_publisher', name='joint_state_publisher', arguments=[urdf_model_path], output='screen', ) fishbot_bringup_node = Node( package='fishbot_bringup', executable='fishbot_bringup', name='fishbot_bringup', output='screen', ) ld.add_action(joint_state_publisher_node) ld.add_action(robot_state_publisher_node) ld.add_action(fishbot_bringup_node) return ld -
@2216200358 在 拓展3:FishBot 树莓派配置建图导航 中说:
robot_state_publisher_node = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
arguments=[urdf_model_path]
)这个写的感觉不太对,应该加个参数好像,你看看书前面的代码,或者最近B站的课程,也可以把TF贴出来看看
-
@小鱼 ```
#include <rclcpp/rclcpp.hpp>
#include <rclcpp/rclcpp.hpp>
#include <nav_msgs/msg/odometry.hpp>
#include <tf2/utils.h>
#include <tf2_ros/transform_broadcaster.h>class TopicSubscribe01 : public rclcpp::Node
{
public:
TopicSubscribe01(std::string name) : Node(name)
{
RCLCPP_INFO(this->get_logger(), "大家好,我是%s.", name.c_str());
odom_subscribe_ = this->create_subscription<nav_msgs::msg::Odometry>("odom", rclcpp::SensorDataQoS(), std::bind(&TopicSubscribe01::odom_callback, this, std::placeholders::1));
tf_broadcaster = std::make_unique<tf2_ros::TransformBroadcaster>(this);
}private:
// 声明一个订阅者
rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr odom_subscribe_;
std::unique_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;
nav_msgs::msg::Odometry odom_msg_;void odom_callback(const nav_msgs::msg::Odometry::SharedPtr msg)
{
(void)msg;
RCLCPP_INFO(this->get_logger(), "recv odom->base_footprint tf :(%f,%f)", msg->pose.pose.position.x, msg->pose.pose.position.y);
odom_msg_.pose.pose.position.x = msg->pose.pose.position.x;
odom_msg_.pose.pose.position.y = msg->pose.pose.position.y;
odom_msg_.pose.pose.position.z = msg->pose.pose.position.z;odom_msg_.pose.pose.orientation.x = msg->pose.pose.orientation.x; odom_msg_.pose.pose.orientation.y = msg->pose.pose.orientation.y; odom_msg_.pose.pose.orientation.z = msg->pose.pose.orientation.z; odom_msg_.pose.pose.orientation.w = msg->pose.pose.orientation.w;};
public:
void publish_tf()
{
geometry_msgs::msg::TransformStamped transform;
double seconds = this->now().seconds();
transform.header.stamp = rclcpp::Time(static_cast<uint64_t>(seconds * 1e9));
transform.header.frame_id = "odom";
transform.child_frame_id = "base_footprint";transform.transform.translation.x = odom_msg_.pose.pose.position.x; transform.transform.translation.y = odom_msg_.pose.pose.position.y; transform.transform.translation.z = odom_msg_.pose.pose.position.z; transform.transform.rotation.x = odom_msg_.pose.pose.orientation.x; transform.transform.rotation.y = odom_msg_.pose.pose.orientation.y; transform.transform.rotation.z = odom_msg_.pose.pose.orientation.z; transform.transform.rotation.w = odom_msg_.pose.pose.orientation.w; tf_broadcaster_->sendTransform(transform);}
};int main(int argc, char argv)
{
rclcpp::init(argc, argv);
/产生一个的节点/
auto node = std::make_shared<TopicSubscribe01>("fishbot_bringup");
/ 运行节点,并检测退出信号/
rclcpp::WallRate loop_rate(1000.0);
while (rclcpp::ok())
{
rclcpp::spin_some(node);
node->publish_tf();
loop_rate.sleep();
}rclcpp::shutdown();
return 0;
} -
@小鱼 tf指的是 rqt-tf-tree 图,可以看看前面基础课程
-
小 小鱼 在 中 引用了 这个主题
-
@小鱼 在 拓展3:FishBot 树莓派配置建图导航 中说:
ros2 launch fishbot_bringup fishbot_bringup.launch.py
ken@ken-desktop:~/fishbot$ ros2 launch fishbot_bringup fishbot_bringup.launch.py
[INFO] [launch]: All log files can be found below /home/ken/.ros/log/2025-02-11-10-49-43-274026-ken-desktop-11936
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [joint_state_publisher-1]: process started with pid [11939]
[INFO] [robot_state_publisher-2]: process started with pid [11940]
[INFO] [fishbot_bringup-3]: process started with pid [11941]
[robot_state_publisher-2] [WARN] [1739242183.457418801] [robot_state_publisher]: No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future.
[robot_state_publisher-2] [INFO] [1739242183.470537019] [robot_state_publisher]: Robot initialized
[fishbot_bringup-3] [INFO] [1739242183.476659215] [fishbot_bringup]: 大家好,我是fishbot_bringup.
鱼哥,出现这种情况是怎么回事呢? -
@Dutton_Ranch 可以忽略,确保 rqt-tf-tree 正常就行
-
鱼哥,我在运行slam之后出现以下情况,rvzi2显示的图像也仅仅是小红点,请问这是正常的吗?
ken@ken-desktop:~$ ros2 launch slam_toolbox online_async_launch.py
[INFO] [launch]: All log files can be found below /home/ken/.ros/log/2025-02-11-16-08-46-957579-ken-desktop-5364
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [async_slam_toolbox_node-1]: process started with pid [5380]
[async_slam_toolbox_node-1] [INFO] [1739261328.623784436] [slam_toolbox]: Node using stack size 40000000
[async_slam_toolbox_node-1] [INFO] [1739261328.759676062] [slam_toolbox]: Configuring
[async_slam_toolbox_node-1] [INFO] [1739261328.827550390] [slam_toolbox]: Using solver plugin solver_plugins::CeresSolver
[async_slam_toolbox_node-1] [INFO] [1739261328.828714298] [slam_toolbox]: CeresSolver: Using SCHUR_JACOBI preconditioner.
[INFO] [launch.user]: [LifecycleLaunch] Slamtoolbox node is activating.
[async_slam_toolbox_node-1] [INFO] [1739261328.985683981] [slam_toolbox]: Activating
[async_slam_toolbox_node-1] Info: clipped range threshold to be within minimum and maximum range!
[async_slam_toolbox_node-1] [WARN] [1739261329.115561229] [slam_toolbox]: maximum laser range setting (20.0 m) exceeds the capabilities of the used Lidar (8.0 m)
[async_slam_toolbox_node-1] Registering sensor: [Custom Described Lidar]
如果这个时候我保存地图成功,但是与rvzi2的显示不同,请问如何设置才能让rvzi2和保存的图片一致呢? -
@小鱼 好的谢谢
-
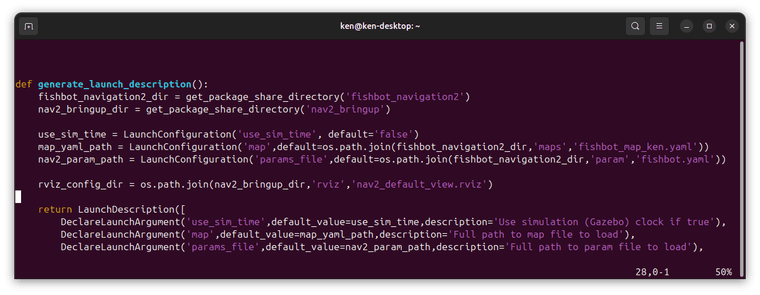
@小鱼 你好,我想问一下为什么我在将建立好的地图导入后并且修改了launch文件,开始导航后出现的图片为
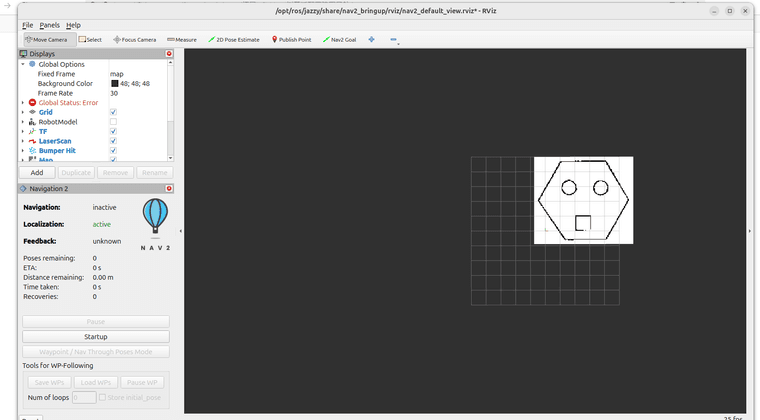 ,我修改后的launch文件为
,我修改后的launch文件为
-
@Dutton_Ranch 修改后重新编译了吗,看一下ROS2基础教程
-
@小鱼 谢谢提醒,我在基础教程里找到问题了,我的.yaml文件中image名称没有修改过来。
-
使用ros2 launch slam_toolbox online_async_launch.py尝试建图时,rviz2不出来,一直刷屏以下信息,但是雷达驱动显示运行正常:
zhangyiyang@zyyvm:~ros2 launch slam_toolbox online_async_launch.py y
[INFO] [launch]: All log files can be found below /home/zhangyiyang/.ros/log/2025-03-14-19-33-49-929416-zyyvm-5974
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [async_slam_toolbox_node-1]: process started with pid [5975]
[async_slam_toolbox_node-1] [INFO] [1741952030.006095281] [slam_toolbox]: Node using stack size 40000000
[async_slam_toolbox_node-1] [INFO] [1741952030.033581923] [slam_toolbox]: Using solver plugin solver_plugins::CeresSolver
[async_slam_toolbox_node-1] [INFO] [1741952030.033781755] [slam_toolbox]: CeresSolver: Using SCHUR_JACOBI preconditioner.
[async_slam_toolbox_node-1] [INFO] [1741952034.689733552] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952033.579 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952035.814472898] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952033.704 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952035.868816359] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952033.829 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952035.869818823] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952033.954 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952035.869963191] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952034.079 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.072087724] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952034.204 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.072303465] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952034.329 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.136468640] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952034.454 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.136650859] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952034.579 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.560468729] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952034.704 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.579410923] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952034.954 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.671219241] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952035.079 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.671433579] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952035.204 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952036.671550686] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952035.329 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1741952037.107363519] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1741952035.454 for reason 'discarding message because the queue is full'