[FishBot教程]9.0.7. FishBot-Nav2导航测试
-
@1250372262 这款雷达 没有测试过,有这个可能
-
@小鱼 那这块有什么解决的办法,这个雷达板的源代码有么,或者您这面改个大小 我重刷一下试试
-
@1250372262 源码在资料页面的最后
-
@小鱼 fishbot-laser-control 是这个代码么? 这个里面我没有具体找到哪一块是处理这个数据的,应该不太可能是test下面的。
-
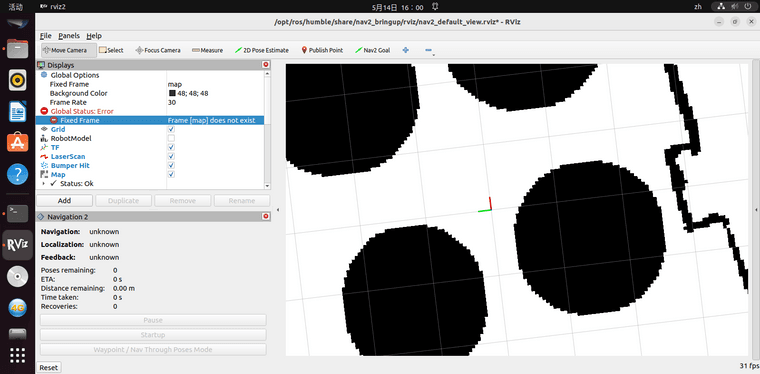
雷达好用了,建图都是没有问题的了 然后我按照导航测试那块 启动了fishbot_bringup 然后把地图换了,启动导航的时候地图能加载出来,但是点击2D Pose Estimate的时候,界面没有反应,不像之前那样了,并且也不能导航
-
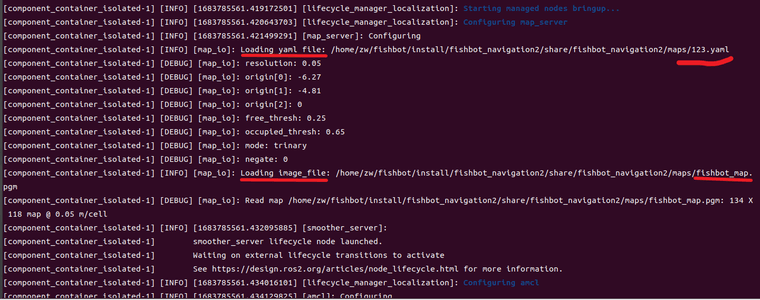
@小鱼 我到fishbot这个文件夹下colcon build编译了,但打开还是我上面那个地图,然后我看了看运行后客户端信息,应该是我标红的地方有问题,但我不知道怎么修改
-
@1762363551 贴一下yaml文件内容
-
@小鱼 谢谢小鱼提醒,确实是yaml文件的问题,yaml文件中image后的名称要和建图得到的.pgm一致,我这之前不知道咋回事错了。
123.yamlimage: 123.pgm mode: trinary resolution: 0.05 origin: [-6.27, -4.81, 0] negate: 0 occupied_thresh: 0.65 free_thresh: 0.25 -
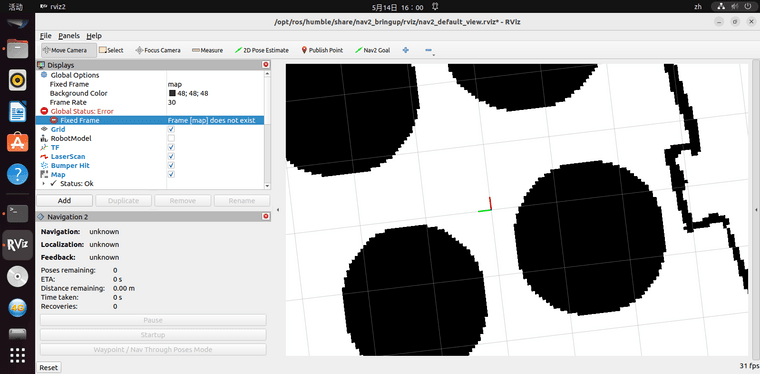
我这里在自动导航的部分点了2D Pose Estimate 给出了点和方向,没有反应是什么原因,显示如图 -
@1683127550 请单独发帖,提供上下文信息
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼 我用的就是咱们的套件和对应的代码,但是在导航那里出问题了
-
这里使用的是fishbot套件,并使用官方提供完整代码,但是在导航过程中出现问题,这里我在导航设置小车位置的过程点击 2F Point Estimate 设置点和方向之后,还是没有反应,无法进行导航,好像是没有设置成功,该怎么解决
-
@1683127550 让你发贴的原因是,我需要确认更多的信息
终端日志
系统版本
ROS版本
代码版本
前后操作
甚至网络环境
节点运行关系图
这些才能判断出问题,不然仅靠一张图再牛的人也没办法,还请理解 -
此回复已被删除! -
-
@小鱼 使用的是ubuntu22,ROS2版本是humble,在烧录成功之后直接按照网站上的步骤进行操作的,从头到尾
这几步按顺序做的,但是我在建图之后,用ps将地图修改了一下,然后就直接启动雷达并进行导航,这里出现了导航那里失败了

在导航过程中出现问题,这里我在导航设置小车位置的过程点击 2F Point Estimate 设置点和方向之后,还是没有反应,无法进行导航,好像是没有设置成功,该怎么解决
这里网络环境测试没有问题,代码就是上面步骤里面的代码连接直接下载的 -
@1683127550 终端日志,代码版本,节点运行关系图
另外请单独发帖!!!! -
鱼哥 安装依赖的时候出的这个问题
ERROR: the following packages/stacks could not have their rosdep keys resolved to system dependencies: fishbot_description: Cannot locate rosdep definition for [ament_python] Continuing to install resolvable dependencies... #All required rosdeps installed successfully -
此回复已被删除! -
@2496480233 然后colcon build报错
Starting >>> fishbot_bringup Starting >>> fishbot_cartographer Finished <<< fishbot_cartographer [0.12s] Starting >>> fishbot_description Finished <<< fishbot_bringup [0.31s] Starting >>> fishbot_interfaces --- stderr: fishbot_interfaces CMake Error at /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:240 (list): list index: 1 out of range (-1, 0) Call Stack (most recent call first): CMakeLists.txt:29 (rosidl_generate_interfaces) CMake Error at /opt/ros/humble/share/rosidl_generator_c/cmake/rosidl_generator_c_generate_interfaces.cmake:69 (message): Target dependency '/fishbot/build/fishbot_interfaces/rosidl_adapter/fishbot_interfaces/srv/FishBotConfig.idl' does not exist Call Stack (most recent call first): /opt/ros/humble/share/ament_cmake_core/cmake/core/ament_execute_extensions.cmake:48 (include) /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:286 (ament_execute_extensions) CMakeLists.txt:29 (rosidl_generate_interfaces) --- Failed <<< fishbot_interfaces [0.30s, exited with code 1] Aborted <<< fishbot_description [0.63s] Summary: 2 packages finished [0.89s] 1 package failed: fishbot_interfaces 1 package aborted: fishbot_description 2 packages had stderr output: fishbot_description fishbot_interfaces 1 package not processed