重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
3568485143 发布的帖子
-
物理机器人导航到目标点之后不会停下来发布在 ROS2
ros2 galactic Ubuntu20.04 阿克曼底盘
采用navigation2导航堆栈中的Hybrid-A*算法插件和teb插件进行单点导航
车子运行到rviz上发布的目标点之后,不会停下来。全局规划器会继续规划一条圆圈形状的路径继续往前走。
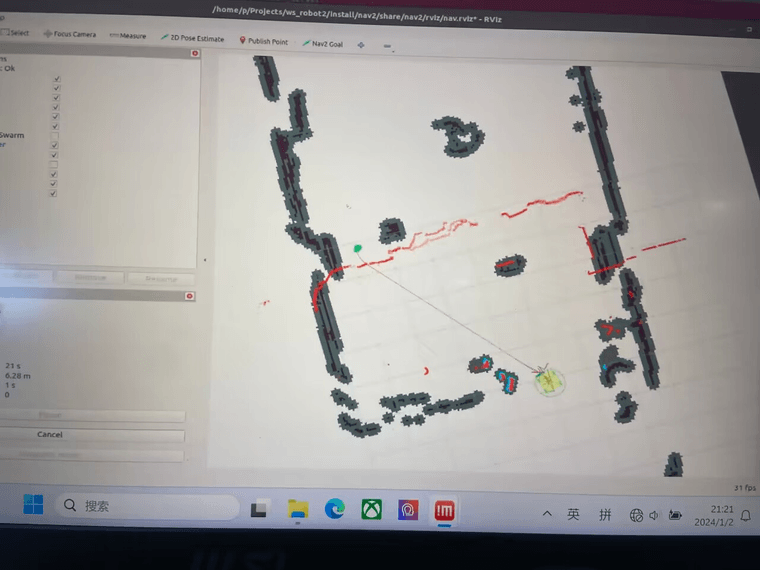
如上图,绿色点为rviz上发布的目标点。
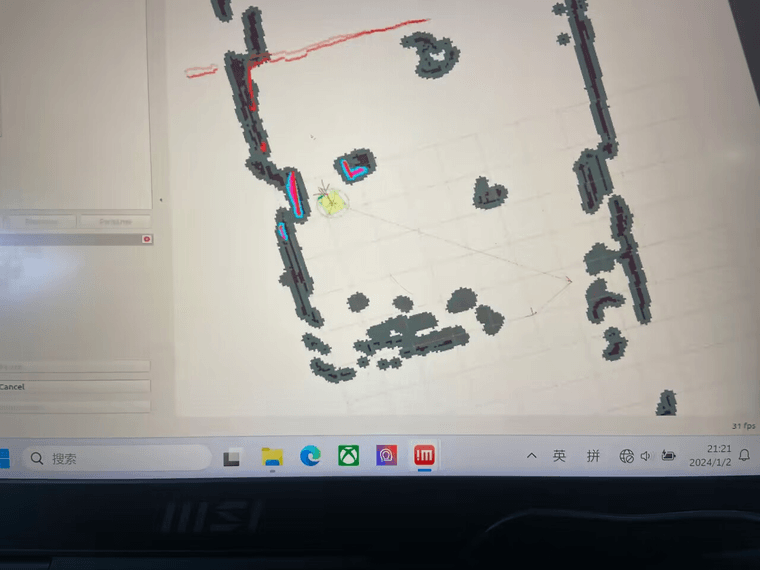
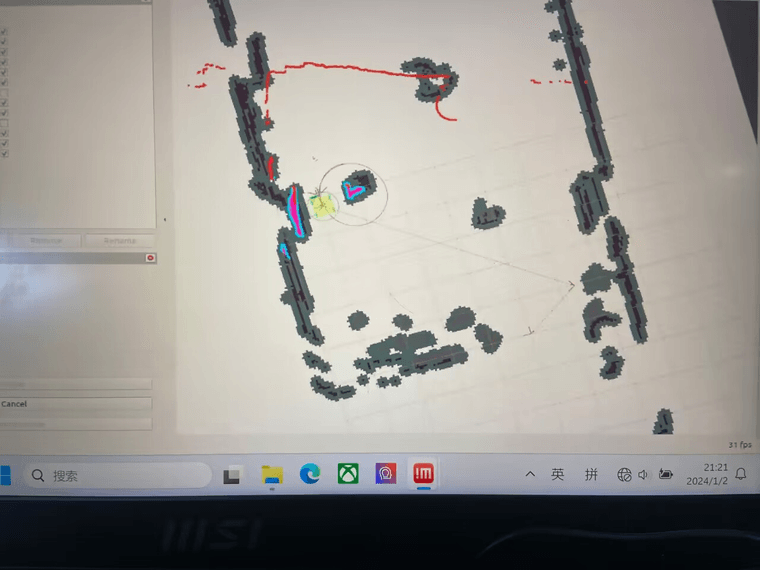
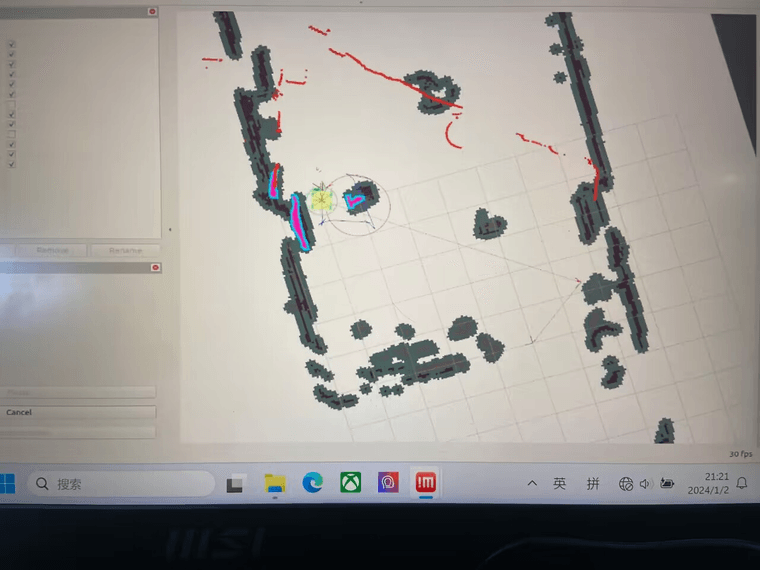
如上图,车辆到了目标点之后,会继续往前走。
请问为什么车辆到了目标点不会停下来?有什么解决办法没?谢谢各位大佬!!卡在这好久了,忘大佬们伸伸手帮一下

-
参数是什么意思发布在 动手学ROS2
鱼哥和各位大佬好,我想请问nav2的参数配置文件中的参数意义,如下参数文件
amcl:
ros__parameters:
use_sim_time: True
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_link"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 5000
min_particles: 500
initial_pose_x: 0.0
initial_pose_y: 0.0
initial_pose_a: 0.0
initial_cov_xx: 32
initial_cov_yy: 32
initial_cov_zz: 32
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 10.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scanamcl_map_client:
ros__parameters:
use_sim_time: Trueamcl_rclcpp_node:
ros__parameters:
use_sim_time: Truebt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_smooth_path_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_back_up_action_bt_node
- nav2_drive_on_heading_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_globally_updated_goal_condition_bt_node
- nav2_is_path_valid_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_truncate_path_local_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_path_expiring_timer_condition
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
- nav2_controller_cancel_bt_node
- nav2_path_longer_on_approach_bt_node
- nav2_wait_cancel_bt_node
- nav2_spin_cancel_bt_node
- nav2_back_up_cancel_bt_node
- nav2_drive_on_heading_cancel_bt_nodebt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: Truecontroller_server:
ros__parameters:
use_sim_time: True
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]# Progress checker parameters progress_checker: plugin: "nav2_controller::SimpleProgressChecker" required_movement_radius: 0.5 movement_time_allowance: 10.0 # Goal checker parameters #precise_goal_checker: # plugin: "nav2_controller::SimpleGoalChecker" # xy_goal_tolerance: 0.25 # yaw_goal_tolerance: 0.25 # stateful: True general_goal_checker: stateful: True plugin: "nav2_controller::SimpleGoalChecker" xy_goal_tolerance: 0.25 yaw_goal_tolerance: 0.25 # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: 0.0 min_vel_y: 0.0 max_vel_x: 0.26 max_vel_y: 0.0 max_vel_theta: 1.0 min_speed_xy: 0.0 max_speed_xy: 0.26 min_speed_theta: 0.0 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x: 2.5 acc_lim_y: 0.0 acc_lim_theta: 3.2 decel_lim_x: -2.5 decel_lim_y: 0.0 decel_lim_theta: -3.2 vx_samples: 20 vy_samples: 5 vtheta_samples: 20 sim_time: 1.7 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.25 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.02 PathAlign.scale: 32.0 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 24.0 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 32.0 GoalDist.scale: 24.0 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0controller_server_rclcpp_node:
ros__parameters:
use_sim_time: Truelocal_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: True
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.12
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.35
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
map_subscribe_transient_local: True
always_send_full_costmap: True
local_costmap_client:
ros__parameters:
use_sim_time: True
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: Trueglobal_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: True
robot_radius: 0.12
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.35
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: True
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: Truemap_server:
ros__parameters:
use_sim_time: True
yaml_filename: "turtlebot3_world.yaml"map_saver:
ros__parameters:
use_sim_time: True
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: Trueplanner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: True
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: trueplanner_server_rclcpp_node:
ros__parameters:
use_sim_time: Truesmoother_server:
ros__parameters:
use_sim_time: True
smoother_plugins: ["simple_smoother"]
simple_smoother:
plugin: "nav2_smoother::SimpleSmoother"
tolerance: 1.0e-10
max_its: 1000
do_refinement: Truebehavior_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
behavior_plugins: ["spin", "backup", "drive_on_heading", "wait"]
spin:
plugin: "nav2_behaviors/Spin"
backup:
plugin: "nav2_behaviors/BackUp"
drive_on_heading:
plugin: "nav2_behaviors/DriveOnHeading"
wait:
plugin: "nav2_behaviors/Wait"
global_frame: odom
robot_base_frame: base_link
transform_tolerance: 0.1
use_sim_time: true
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2robot_state_publisher:
ros__parameters:
use_sim_time: Truewaypoint_follower:
ros__parameters:
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200请问,其中的
amcl_map_client:
ros__parameters:
use_sim_time: Trueamcl_rclcpp_node:
ros__parameters:
use_sim_time: Truebt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: True等等这些在官网参数配置中看不到的节点配置是怎么来的?
感谢!!!
-
rosdepc无法安装依赖发布在 综合问题
ros2版本galactic
在导航实物部署中,想使用teb_local_planner算法对dwb算法进行替换,但在teb算法的源码安装中出现编译时缺少libg2o依赖库的问题。于是想使用rosdepc安装libg2o依赖库。
运行命令:rosdepc install -i --from-path src --rosdistro galactic -y
出现错误:欢迎使用国内版rosdep之rosdepc,我是作者小鱼!
欢迎关注公众号《鱼香ROS》加入交流群
小鱼rosdepc正式为您服务
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
teb_local_planner: Cannot locate rosdep definition for [libg2o]rosdepc已进行过init和update
求助怎么解决
-
导航实物部署发布在 Nav2
在实物机器人上面进行导航部署,已完成建图操作。实物机器人能提供里程计信息。传感器为镭神m10_p激光雷达。但在进行导航实践时出现错误:
[amcl-8] [INFO] [1693798122.384041701] [amcl_rclcpp_node]: Message Filter dropping message: frame 'laser_link' at time 1693798121.550 for reason 'discarding message because the queue is full'
[rviz2-16] [INFO] [1693798122.398805178] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1693798121.550 for reason 'discarding message because the queue is full'部署在orin nx板子上面,ubuntu系统为20.04,ros2版本为galactic。
launch文件nav2.launch.py如下:
import os
from launch_ros.substitutions import FindPackageShare
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import IncludeLaunchDescription,ExecuteProcess
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Nodedef generate_launch_description():
nav2_bringup_dir = get_package_share_directory('nav2_bringup') launch_dir = get_package_share_directory('nav2') pkg_share_laser = get_package_share_directory('lslidar_driver') rviz_config_dir = os.path.join(nav2_bringup_dir,'rviz','nav2_default_view.rviz') urdf_model_path = os.path.join(launch_dir, f'urdf/{"fishbot_gazebo.urdf"}') #是否使用仿真时间,我们用gazebo,这里设置成true use_sim_time = LaunchConfiguration('use_sim_time', default='false') map_yaml_path = LaunchConfiguration('map',default= os.path.join(launch_dir,'map','map4.yaml')) nav2_param_path = LaunchConfiguration('params_file',default=os.path.join(launch_dir,'param','nav.yaml')) # 地图的分辨率 # 地图的发布周期 return LaunchDescription([ DeclareLaunchArgument('use_sim_time',default_value=use_sim_time,description='Use simulation (Gazebo) clock if true'), DeclareLaunchArgument('map',default_value=map_yaml_path,description='Full path to map file to load'), DeclareLaunchArgument('params_file',default_value=nav2_param_path,description='Full path to param file to load'), IncludeLaunchDescription( PythonLaunchDescriptionSource([pkg_share_laser,'/launch','/lsm10p_net_launch.py'])), ExecuteProcess( cmd=['sleep', '10'], output='screen'), Node( package='robot_state_publisher', executable='robot_state_publisher', name='robot_state_publisher', arguments=[urdf_model_path]), Node( package='bringup', executable='odom', name='odom_node', output='screen'), Node( package='joint_state_publisher_gui', executable='joint_state_publisher_gui', name='joint_state_publisher_gui', arguments=[urdf_model_path]), Node( package='robot_localization', executable='ekf_node', name='ekf_filter_node', output='screen', parameters=[os.path.join(launch_dir, 'conf/ekf.yaml'), {'use_sim_time': use_sim_time}]), IncludeLaunchDescription( PythonLaunchDescriptionSource([nav2_bringup_dir,'/launch','/bringup_launch.py']), launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(),), Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen'),])其中odom_node是自己写的串口通信模块,用于发布里程计信息和订阅cmd_vel信息。
nav的配置文件nav.yaml如下:
amcl:
ros__parameters:
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
map_topic: map
set_initial_pose: false
always_reset_initial_pose: false
initial_pose:
x: 0.0
y: 0.0
z: 0.0
yaw: 0.0amcl_map_client:
ros__parameters:
use_sim_time: Trueamcl_rclcpp_node:
ros__parameters:
use_sim_time: Truebt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_nodebt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: Truecontroller_server:
ros__parameters:
use_sim_time: True
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]# Progress checker parameters progress_checker: plugin: "nav2_controller::SimpleProgressChecker" required_movement_radius: 0.5 movement_time_allowance: 10.0 # Goal checker parameters #precise_goal_checker: # plugin: "nav2_controller::SimpleGoalChecker" # xy_goal_tolerance: 0.25 # yaw_goal_tolerance: 0.25 # stateful: True general_goal_checker: stateful: True plugin: "nav2_controller::SimpleGoalChecker" xy_goal_tolerance: 0.25 yaw_goal_tolerance: 0.25 # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: 0.0 min_vel_y: 0.0 max_vel_x: 0.26 max_vel_y: 0.0 max_vel_theta: 1.0 min_speed_xy: 0.0 max_speed_xy: 0.26 min_speed_theta: 0.0 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x: 2.5 acc_lim_y: 0.0 acc_lim_theta: 3.2 decel_lim_x: -2.5 decel_lim_y: 0.0 decel_lim_theta: -3.2 vx_samples: 20 vy_samples: 5 vtheta_samples: 20 sim_time: 1.7 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.25 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.02 PathAlign.scale: 32.0 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 24.0 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 32.0 GoalDist.scale: 24.0 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0controller_server_rclcpp_node:
ros__parameters:
use_sim_time: Truelocal_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: True
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.40
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
map_subscribe_transient_local: True
always_send_full_costmap: True
local_costmap_client:
ros__parameters:
use_sim_time: True
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: Trueglobal_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: True
robot_radius: 0.40
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: True
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: Truemap_server:
ros__parameters:
use_sim_time: True
yaml_filename: "map4.yaml"
topic_name: "map"
frame_id: "map"map_saver:
ros__parameters:
use_sim_time: True
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: Trueplanner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: True
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: trueplanner_server_rclcpp_node:
ros__parameters:
use_sim_time: Truerecoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: ["spin", "backup", "wait"]
spin:
plugin: "nav2_recoveries/Spin"
backup:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: odom
robot_base_frame: base_link
transform_timeout: 0.1
use_sim_time: true
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2robot_state_publisher:
ros__parameters:
use_sim_time: Truewaypoint_follower:
ros__parameters:
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200运行ros2 launch nav2 nav2.launch.py,终端显示错误:
[amcl-8] [INFO] [1693802494.007698765] [amcl_rclcpp_node]: Message Filter dropping message: frame 'laser_link' at time 1693802493.174 for reason 'discarding message because the queue is full'
[rviz2-16] [INFO] [1693802494.019894090] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1693802493.174 for reason 'discarding message because the queue is full'求助大佬们怎么解决。感激不尽!!!
-
nav2进行导航时出现错误,求助!!发布在 Nav2
根据《动手学ros2》进行fishbot的nav2导航仿真,在执行程序:
ros2 launch fishbot_navigation2 navigation2.launch.py
时终端出现以下错误:
[bt_navigator-7] [ERROR] []: Caught exception in callback for transition 10
[bt_navigator-7] [ERROR] []: Original error: Could not load library: /home/outerman1/fishbot_ws/install/nav2_behavior_tree/lib/libnav2_compute_path_to_pose_action_bt_node.so: undefined symbol: _ZTIN2BT14CoroActionNodeE
[bt_navigator-7] [WARN] []: Error occurred while doing error handling.
[bt_navigator-7] [FATAL] [bt_navigator]: Lifecycle node entered error state
[lifecycle_manager-1] [ERROR] [lifecycle_manager]: Failed to change state for node: bt_navigator
[lifecycle_manager-1] [ERROR] [lifecycle_manager]: Failed to bring up nodes: aborting bringuprviz2中显示的内容如下:
对照github上鱼哥发的源码,发现代码部分不存在问题
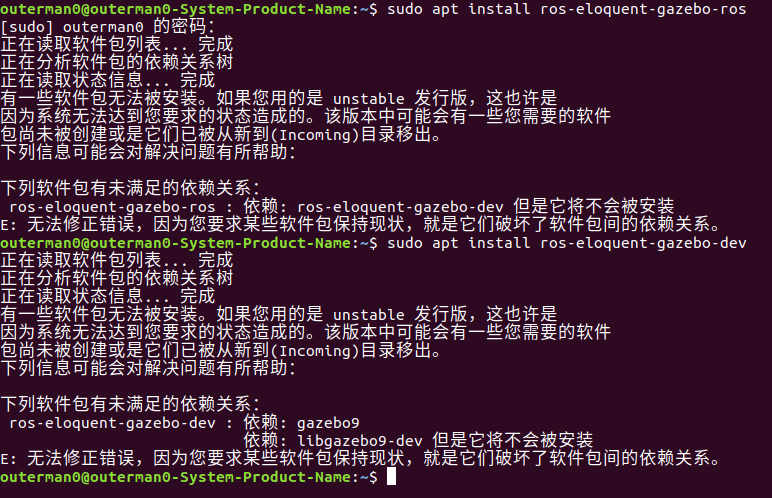
当前使用的是ros2-eloquent版本,ubuntu是18.04,源码安装nav2和apt安装nav2都尝试过,均出现以上错误。
卡了好几天,希望大佬帮助一下,感谢!!
-
RE: 求助,源码安装cartographer出错发布在 ROS2
@小鱼 ros2版本是eloquent,ubuntu版本是18.04。ros2安装了,rosdepc也装了。根据《动手学ros2》中进行cartographer的源码安装,报错如下:
1.使用rosdepc安装所需依赖:
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
时出现以下错误:欢迎使用国内版rosdep之rosdepc,我是作者小鱼!
欢迎关注公众号《鱼香ROS》加入交流群
小鱼rosdepc正式为您服务
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
cartographer: [libabsl-dev] defined as "not available" for OS version [bionic]
cartographer_ros: Cannot locate rosdep definition for [rosbag2_storage]
cartographer_rviz: [libabsl-dev] defined as "not available" for OS version [bionic]
Continuing to install resolvable dependencies...
#All required rosdeps installed successfully
如果在使用过程中遇到任何问题,欢迎通过fishros.org.cn反馈,最后加入QQ交流群 686914208(入群口令:一键安装)2.跳过1中的错误,直接在执行编译环节
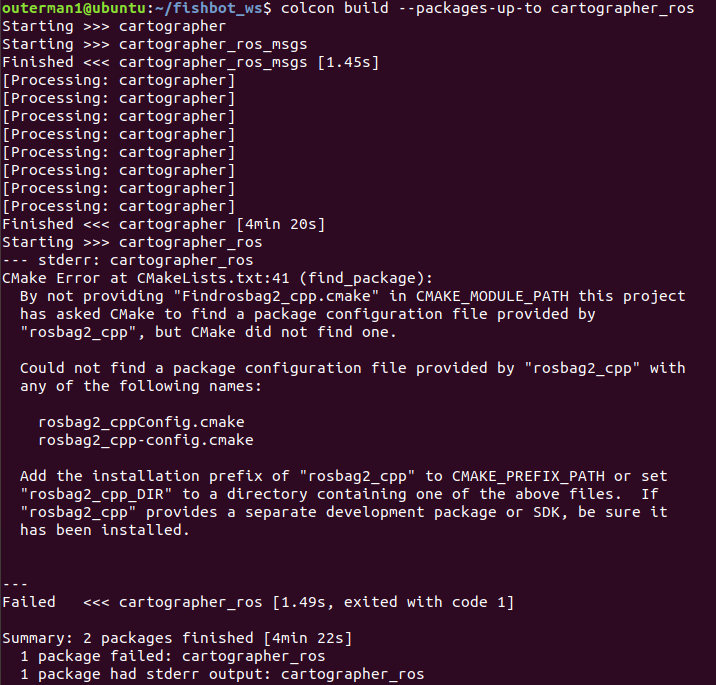
colcon build --packages-up-to cartographer_ros
时出现以下错误:outerman1@ubuntu:~/fishbot_ws$ colcon build --packages-up-to cartographer_ros
Starting >>> cartographer
Starting >>> cartographer_ros_msgs
Finished <<< cartographer_ros_msgs [2.34s]
Finished <<< cartographer [4.44s]
Starting >>> cartographer_ros
--- stderr: cartographer_ros
CMake Error at CMakeLists.txt:41 (find_package):
By not providing "Findrosbag2_cpp.cmake" in CMAKE_MODULE_PATH this project
has asked CMake to find a package configuration file provided by
"rosbag2_cpp", but CMake did not find one.
Could not find a package configuration file provided by "rosbag2_cpp" with
any of the following names:
rosbag2_cppConfig.cmake
rosbag2_cpp-config.cmake
Add the installation prefix of "rosbag2_cpp" to CMAKE_PREFIX_PATH or set
"rosbag2_cpp_DIR" to a directory containing one of the above files. If
"rosbag2_cpp" provides a separate development package or SDK, be sure it
has been installed.
Failed <<< cartographer_ros [0.46s, exited with code 1]
Summary: 2 packages finished [5.13s]
1 package failed: cartographer_ros
1 package had stderr output: cartographer_ros请问怎么解决,感谢!
-
RE: 求助,源码安装cartographer出错发布在 ROS2
@小鱼 ros2安装了,rosdepc也装了,然后在cartographer安装环节执行
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
时出现以下错误:
欢迎使用国内版rosdep之rosdepc,我是作者小鱼!
欢迎关注公众号《鱼香ROS》加入交流群
小鱼rosdepc正式为您服务
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
cartographer: [libabsl-dev] defined as "not available" for OS version [bionic]
cartographer_ros: Cannot locate rosdep definition for [rosbag2_storage]
cartographer_rviz: [libabsl-dev] defined as "not available" for OS version [bionic]
Continuing to install resolvable dependencies...
#All required rosdeps installed successfully如果在使用过程中遇到任何问题,欢迎通过fishros.org.cn反馈,最后加入QQ交流群 686914208(入群口令:一键安装)
最后在执行colcon build --packages-up-to cartographer_ros环节时出现以下错误:
outerman1@ubuntu:~/fishbot_ws$ colcon build --packages-up-to cartographer_ros
Starting >>> cartographer
Starting >>> cartographer_ros_msgs
Finished <<< cartographer_ros_msgs [2.34s]
Finished <<< cartographer [4.44s]
Starting >>> cartographer_ros
--- stderr: cartographer_ros
CMake Error at CMakeLists.txt:41 (find_package):
By not providing "Findrosbag2_cpp.cmake" in CMAKE_MODULE_PATH this project
has asked CMake to find a package configuration file provided by
"rosbag2_cpp", but CMake did not find one.Could not find a package configuration file provided by "rosbag2_cpp" with
any of the following names:rosbag2_cppConfig.cmake rosbag2_cpp-config.cmakeAdd the installation prefix of "rosbag2_cpp" to CMAKE_PREFIX_PATH or set
"rosbag2_cpp_DIR" to a directory containing one of the above files. If
"rosbag2_cpp" provides a separate development package or SDK, be sure it
has been installed.
Failed <<< cartographer_ros [0.46s, exited with code 1]
Summary: 2 packages finished [5.13s]
1 package failed: cartographer_ros
1 package had stderr output: cartographer_ros请问怎么解决,感谢!
-
RE: 求助啊大佬们发布在 ROS2
@1165420875
gazebo.launch.py文件中那个urdf_name中的gazebo_base.urdf改成fishbot_base.urdf就可以了,我是这样的
-
求助啊大佬们发布在 ROS2
在用launch方法生成gazebo启动项和导入urdf文件时出现以下错误:
spawn_entity.py-2] [INFO] [spawn_entity]: Spawn Entity started
[spawn_entity.py-2] [INFO] [spawn_entity]: Loading entity XML from file /home/outerman1/fishbot_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_gazebo.urdf
[spawn_entity.py-2] Traceback (most recent call last):
[spawn_entity.py-2] File "/opt/ros/eloquent/lib/gazebo_ros/spawn_entity.py", line 362, in <module>
[spawn_entity.py-2] main()
[spawn_entity.py-2] File "/opt/ros/eloquent/lib/gazebo_ros/spawn_entity.py", line 357, in main
[spawn_entity.py-2] exit_code = spawn_entity_node.run()
[spawn_entity.py-2] File "/opt/ros/eloquent/lib/gazebo_ros/spawn_entity.py", line 140, in run
[spawn_entity.py-2] self.get_logger().error('Error: specified file %s does not exist', self.args.file)
[spawn_entity.py-2] TypeError: error() takes 2 positional arguments but 3 were given
[ERROR] [spawn_entity.py-2]: process has died [pid 40742, exit code 1, cmd '/opt/ros/eloquent/lib/gazebo_ros/spawn_entity.py -entity fishbot -file /home/outerman1/fishbot_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_gazebo.urdf --ros-args'].
launch文件如下:
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageSharedef generate_launch_description():
robot_name_in_model = 'fishbot'
package_name = 'fishbot_description'
urdf_name = "fishbot_gazebo.urdf"ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') # Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so'], output='screen') # Launch the robot spawn_entity_cmd = Node( package='gazebo_ros', node_executable='spawn_entity.py', arguments=['-entity',robot_name_in_model,'-file',urdf_model_path], output='screen') ld.add_action(start_gazebo_cmd) ld.add_action(spawn_entity_cmd) return ld结果是:gazebo启动成功,但是未导入文件

 /home/outerman0/图片/2023-03-30 14-51-46 的屏幕截图.png
/home/outerman0/图片/2023-03-30 14-51-46 的屏幕截图.png