[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
@1281857896 nav2的配置也贴一下
-
此回复已被删除! -
@1281857896 求求了,不要截图不要截图,手机上一点都看不清,还不好复制粘贴
-
@1281857896 基本没改啥,主要use_sim_time全都变成了false,然后把地图的膨胀半径减小,小车底盘的半径减小
-
@小鱼 amcl:
ros__parameters:
use_sim_time: false
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scanbt_navigator:
ros__parameters:
use_sim_time: false
global_frame: map
robot_base_frame: base_footprint
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_smooth_path_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_assisted_teleop_action_bt_node
- nav2_back_up_action_bt_node
- nav2_drive_on_heading_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_globally_updated_goal_condition_bt_node
- nav2_is_path_valid_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_truncate_path_local_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_path_expiring_timer_condition
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_goal_updated_controller_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
- nav2_controller_cancel_bt_node
- nav2_path_longer_on_approach_bt_node
- nav2_wait_cancel_bt_node
- nav2_spin_cancel_bt_node
- nav2_back_up_cancel_bt_node
- nav2_assisted_teleop_cancel_bt_node
- nav2_drive_on_heading_cancel_bt_node
- nav2_is_battery_charging_condition_bt_nodebt_navigator_navigate_through_poses_rclcpp_node:
ros__parameters:
use_sim_time: falsebt_navigator_navigate_to_pose_rclcpp_node:
ros__parameters:
use_sim_time: falsecontroller_server:
ros__parameters:
use_sim_time: false
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]# Progress checker parameters progress_checker: plugin: "nav2_controller::SimpleProgressChecker" required_movement_radius: 0.5 movement_time_allowance: 10.0 # Goal checker parameters #precise_goal_checker: # plugin: "nav2_controller::SimpleGoalChecker" # xy_goal_tolerance: 0.25 # yaw_goal_tolerance: 0.25 # stateful: True general_goal_checker: stateful: True plugin: "nav2_controller::SimpleGoalChecker" xy_goal_tolerance: 0.25 yaw_goal_tolerance: 0.25 # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: 0.0 min_vel_y: 0.0 max_vel_x: 0.26 max_vel_y: 0.0 max_vel_theta: 1.0 min_speed_xy: 0.0 max_speed_xy: 0.26 min_speed_theta: 0.0 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x: 2.5 acc_lim_y: 0.0 acc_lim_theta: 3.2 decel_lim_x: -2.5 decel_lim_y: 0.0 decel_lim_theta: -3.2 vx_samples: 20 vy_samples: 5 vtheta_samples: 20 sim_time: 1.7 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.25 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.02 PathAlign.scale: 32.0 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 24.0 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 32.0 GoalDist.scale: 24.0 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_footprint
use_sim_time: false
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.08
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.15
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
always_send_full_costmap: Trueglobal_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_footprint
use_sim_time: false
robot_radius: 0.08
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.05
always_send_full_costmap: Truemap_server:
ros__parameters:
use_sim_time: false
# Overridden in launch by the "map" launch configuration or provided default value.
# To use in yaml, remove the default "map" value in the tb3_simulation_launch.py file & provide full path to map below.
yaml_filename: ""map_saver:
ros__parameters:
use_sim_time: false
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: Trueplanner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: false
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: truesmoother_server:
ros__parameters:
use_sim_time: false
smoother_plugins: ["simple_smoother"]
simple_smoother:
plugin: "nav2_smoother::SimpleSmoother"
tolerance: 1.0e-10
max_its: 1000
do_refinement: Truebehavior_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
behavior_plugins: ["spin", "backup", "drive_on_heading", "assisted_teleop", "wait"]
spin:
plugin: "nav2_behaviors/Spin"
backup:
plugin: "nav2_behaviors/BackUp"
drive_on_heading:
plugin: "nav2_behaviors/DriveOnHeading"
wait:
plugin: "nav2_behaviors/Wait"
assisted_teleop:
plugin: "nav2_behaviors/AssistedTeleop"
global_frame: odom
robot_base_frame: base_footprint
transform_tolerance: 0.1
use_sim_time: false
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2robot_state_publisher:
ros__parameters:
use_sim_time: falsewaypoint_follower:
ros__parameters:
use_sim_time: false
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200velocity_smoother:
ros__parameters:
use_sim_time: false
smoothing_frequency: 20.0
scale_velocities: False
feedback: "OPEN_LOOP"
max_velocity: [0.26, 0.0, 1.0]
min_velocity: [-0.26, 0.0, -1.0]
max_accel: [2.5, 0.0, 3.2]
max_decel: [-2.5, 0.0, -3.2]
odom_topic: "odom"
odom_duration: 0.1
deadband_velocity: [0.0, 0.0, 0.0]
velocity_timeout: 1.0 -
@小鱼 不好意思,这个没考虑到
-
@1281857896 这个参数是哪里来的
-
@小鱼 第17章建图与导航实践 fishbot导航实现 fishbot导航实现那块安装了nav2功能包,然后从功能包里复制出来的参数就这么多,我刚打开功能包确实是这些参数
复制的时候用的下面这个命令
cp /opt/ros/$ROS_DISTRO/share/nav2_bringup/params/nav2_params.yaml src/fishbot_navigation2/config -
@1281857896 你从快速上手教程里拷贝试试,或者直接用快速上手教程里的导航配置跑跑,看看能不能跑起来
-
@小鱼 有些参数不一样
-
amcl: ros__parameters: use_sim_time: False alpha1: 0.2 alpha2: 0.2 alpha3: 0.2 alpha4: 0.2 alpha5: 0.2 base_frame_id: "base_footprint" beam_skip_distance: 0.5 beam_skip_error_threshold: 0.9 beam_skip_threshold: 0.3 do_beamskip: false global_frame_id: "map" lambda_short: 0.1 laser_likelihood_max_dist: 2.0 laser_max_range: 100.0 laser_min_range: -1.0 laser_model_type: "likelihood_field" max_beams: 60 max_particles: 2000 min_particles: 500 odom_frame_id: "odom" pf_err: 0.05 pf_z: 0.99 recovery_alpha_fast: 0.0 recovery_alpha_slow: 0.0 resample_interval: 1 robot_model_type: "differential" save_pose_rate: 0.5 sigma_hit: 0.2 tf_broadcast: true transform_tolerance: 1.0 update_min_a: 0.2 update_min_d: 0.25 z_hit: 0.5 z_max: 0.05 z_rand: 0.5 z_short: 0.05 amcl_map_client: ros__parameters: use_sim_time: False amcl_rclcpp_node: ros__parameters: use_sim_time: False bt_navigator: ros__parameters: use_sim_time: False global_frame: map robot_base_frame: base_link odom_topic: /odom default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml" plugin_lib_names: - nav2_compute_path_to_pose_action_bt_node - nav2_follow_path_action_bt_node - nav2_back_up_action_bt_node - nav2_spin_action_bt_node - nav2_wait_action_bt_node - nav2_clear_costmap_service_bt_node - nav2_is_stuck_condition_bt_node - nav2_goal_reached_condition_bt_node - nav2_goal_updated_condition_bt_node - nav2_initial_pose_received_condition_bt_node - nav2_reinitialize_global_localization_service_bt_node - nav2_rate_controller_bt_node - nav2_distance_controller_bt_node - nav2_speed_controller_bt_node - nav2_recovery_node_bt_node - nav2_pipeline_sequence_bt_node - nav2_round_robin_node_bt_node - nav2_transform_available_condition_bt_node - nav2_time_expired_condition_bt_node - nav2_distance_traveled_condition_bt_node bt_navigator_rclcpp_node: ros__parameters: use_sim_time: False controller_server: ros__parameters: use_sim_time: False controller_frequency: 10.0 min_x_velocity_threshold: 0.001 min_y_velocity_threshold: 0.5 min_theta_velocity_threshold: 0.001 controller_plugins: ["FollowPath"] # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: 0.0 min_vel_y: 0.0 max_vel_x: 0.22 max_vel_y: 0.0 max_vel_theta: 0.8 min_speed_xy: 0.0 max_speed_xy: 0.44 min_speed_theta: 0.0 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x: 2.5 acc_lim_y: 0.0 acc_lim_theta: 0.2 decel_lim_x: -0.5 decel_lim_y: 0.0 decel_lim_theta: -0.5 vx_samples: 20 vy_samples: 0 vtheta_samples: 40 sim_time: 1.5 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.05 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.02 PathAlign.scale: 32.0 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 24.0 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 32.0 GoalDist.scale: 24.0 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0 controller_server_rclcpp_node: ros__parameters: use_sim_time: False local_costmap: local_costmap: ros__parameters: update_frequency: 5.0 publish_frequency: 2.0 global_frame: odom robot_base_frame: base_link use_sim_time: False rolling_window: true width: 3 height: 3 resolution: 0.05 robot_radius: 0.1 plugins: ["obstacle_layer", "voxel_layer", "inflation_layer"] inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" inflation_radius: 0.2 cost_scaling_factor: 3.0 obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" enabled: True observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" voxel_layer: plugin: "nav2_costmap_2d::VoxelLayer" enabled: True publish_voxel_map: True origin_z: 0.0 z_resolution: 0.05 z_voxels: 16 max_obstacle_height: 2.0 mark_threshold: 0 observation_sources: pointcloud pointcloud: topic: /intel_realsense_r200_depth/points max_obstacle_height: 2.0 clearing: True marking: True data_type: "PointCloud2" static_layer: map_subscribe_transient_local: True always_send_full_costmap: True local_costmap_client: ros__parameters: use_sim_time: False local_costmap_rclcpp_node: ros__parameters: use_sim_time: False global_costmap: global_costmap: ros__parameters: update_frequency: 1.0 publish_frequency: 1.0 global_frame: map robot_base_frame: base_link use_sim_time: False robot_radius: 0.1 resolution: 0.05 plugins: ["static_layer", "obstacle_layer", "voxel_layer", "inflation_layer"] obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" enabled: True observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" voxel_layer: plugin: "nav2_costmap_2d::VoxelLayer" enabled: True publish_voxel_map: True origin_z: 0.0 z_resolution: 0.05 z_voxels: 16 max_obstacle_height: 2.0 mark_threshold: 0 observation_sources: pointcloud pointcloud: topic: /intel_realsense_r200_depth/points max_obstacle_height: 2.0 clearing: True marking: True data_type: "PointCloud2" static_layer: plugin: "nav2_costmap_2d::StaticLayer" map_subscribe_transient_local: True inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" cost_scaling_factor: 1.0 inflation_radius: 0.55 always_send_full_costmap: True global_costmap_client: ros__parameters: use_sim_time: False global_costmap_rclcpp_node: ros__parameters: use_sim_time: False map_server: ros__parameters: use_sim_time: False yaml_filename: "turtlebot3_world.yaml" map_saver: ros__parameters: use_sim_time: False save_map_timeout: 5000 free_thresh_default: 0.25 occupied_thresh_default: 0.65 planner_server: ros__parameters: expected_planner_frequency: 20.0 use_sim_time: False planner_plugins: ["GridBased"] GridBased: plugin: "nav2_navfn_planner/NavfnPlanner" tolerance: 0.5 use_astar: false allow_unknown: true planner_server_rclcpp_node: ros__parameters: use_sim_time: False recoveries_server: ros__parameters: costmap_topic: local_costmap/costmap_raw footprint_topic: local_costmap/published_footprint cycle_frequency: 10.0 recovery_plugins: ["spin", "backup", "wait"] spin: plugin: "nav2_recoveries/Spin" backup: plugin: "nav2_recoveries/BackUp" wait: plugin: "nav2_recoveries/Wait" global_frame: odom robot_base_frame: base_link transform_timeout: 0.1 use_sim_time: False simulate_ahead_time: 2.0 max_rotational_vel: 1.0 min_rotational_vel: 0.4 rotational_acc_lim: 3.2 robot_state_publisher: ros__parameters: use_sim_time: False -
@小鱼 鱼哥,用最新的底板固件加上快速上手里面的fishbot.yaml可以很好实现导航,用那个fishbot_nav2.yaml就会加载不出地图,跑不了,应该是有缺东西
-
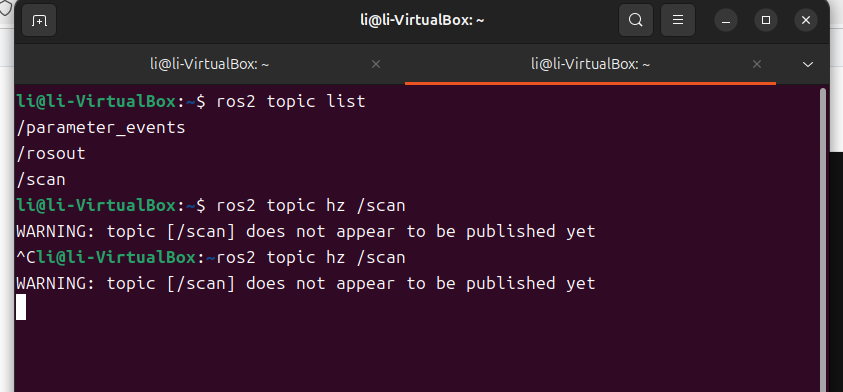
第三步,话题里面有scan,但出现警告是怎么回事

-
@1281857896 对比下文件区别,可能哪里不对劲的
-
-
-
-
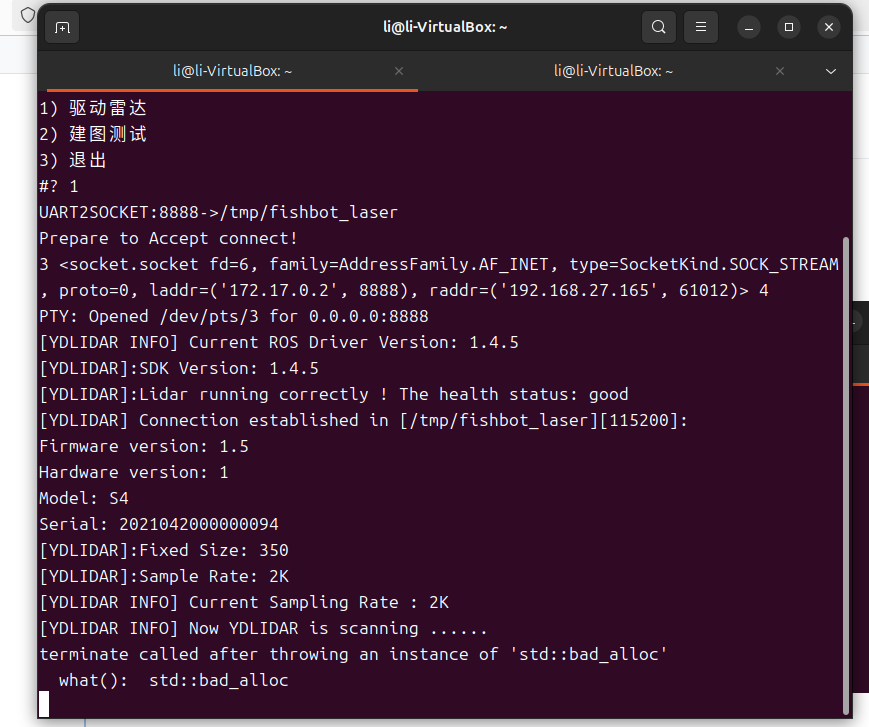
@775405893 雷达驱动意外挂了,重新运行下试试
-
@小鱼 ubuntu 24 ,ros2是jazzy版,虚拟机桥接,雷达连的电脑热点。重启了一下还是这个问题,雷达地址能ping通。
-
@775405893 估计是版本问题,docker里面是22.04的,最好主机也用22.04,教程也是22.04的,还会有坑等着你。你那里有书吗,书上有源码驱动雷达的方法,只能用这个了,或者你需要等一段时间(半个月左右),我抽空时间来适配下24.04系统。