拓展2:FishBot配套雷达驱动教程(源码版)
-
鱼哥,用树莓派通过串口连接转接板后运行雷达出现雷达停止运行了

-
@2524167316 确认下端口号是否正确,串口权限是否正确,可以使用cutecom打开指定端口看看数据。
-
E eework 在 中 引用了 这个主题
-
雷达启动后会发布/map话题么,我在nav2启动的时候遇到如下报错

需要对雷达驱动进行更改么? -
@1141682555 雷达启动只发布sca话题,map需要slam算法发布
-
@小鱼 我现在建图时候一直发生漂移,/map坐标轴是移动的,/odom坐标轴固定不动
<?xml version="1.0"?>
<robot name="pigbot"><!-- Robot Footprint --><link name="base_footprint"/>
<joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0.0 0.0 0.166" rpy="0 0 0"/>
</joint><!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.57 0.45 0.17"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</visual>
</link><!-- laser link -->
<link name="laser_frame">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link><!-- laser joint -->
<joint name="laser_joint" type="fixed">
<parent link="base_link" />
<child link="laser_frame" />
<origin xyz="0 0 0.075" />
</joint><!-- wheel link -->
<link name="left_front_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.166"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link><joint name="left_front_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_front_wheel_link" />
<origin xyz="0.175 0.225 -0.085" />
<axis xyz="0 1 0" />
</joint><link name="left_back_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.166"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link><joint name="left_back_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_back_wheel_link" />
<origin xyz="-0.175 0.225 -0.085" />
<axis xyz="0 1 0" />
</joint><link name="right_front_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.166"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link><joint name="right_front_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_front_wheel_link" />
<origin xyz="0.175 -0.225 -0.085" />
<axis xyz="0 1 0" />
</joint><link name="right_back_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.166"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link><joint name="right_back_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_back_wheel_link" />
<origin xyz="-0.175 -0.225 -0.085" />
<axis xyz="0 1 0" />
</joint></robot>
这是我的URDF,里程计话题发布和教程是一样的,请问中间有什么问题需要更改 -
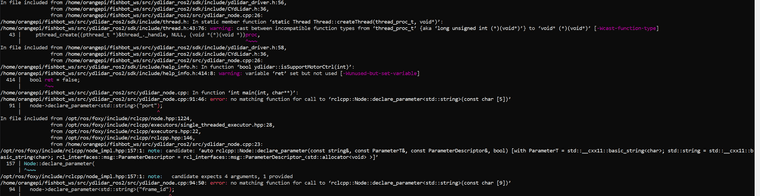
按照教程编译的时候会报错,我的pi上位机版本是:
ROS_VERSION=2
ROS_PYTHON_VERSION=3
ROS_LOCALHOST_ONLY=0
ROS_DISTRO=foxy -
你好,usb一连接到虚拟机,就断开是怎么回事啊。
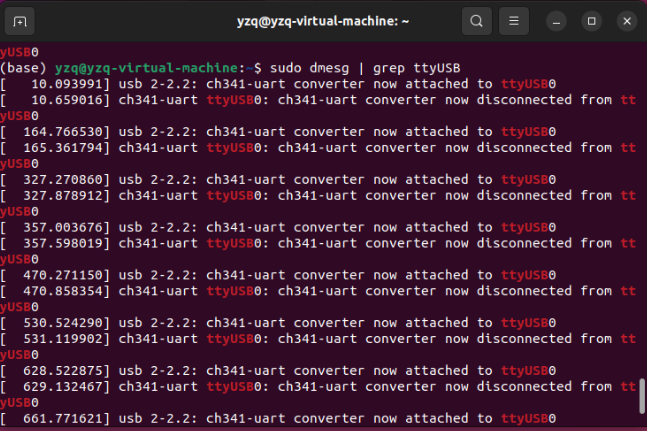 ,谢谢!
,谢谢! -
@distinctyz 看看驱动占用问题是否解决
-
@dong5515 驱动时humble版本导致的,建议更换到humble
-
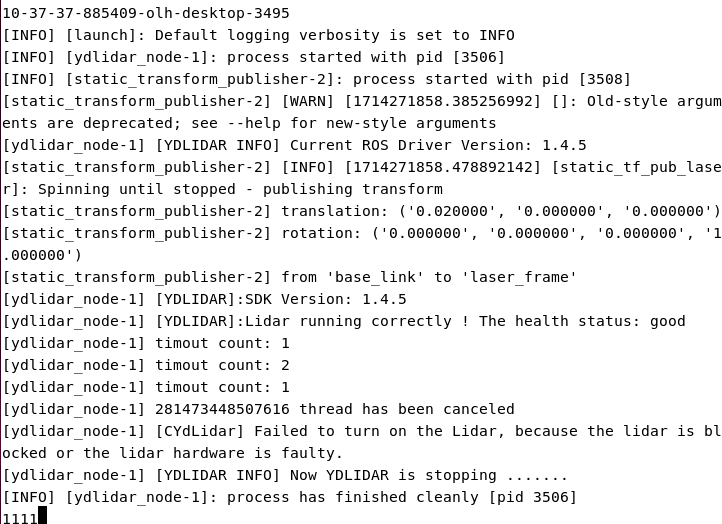
問題: Failed to turn on the lidar,because the lidar is blocked or the lidar hardware is faulty
設備: jetson orin nano
Linux: Ubuntu22.04
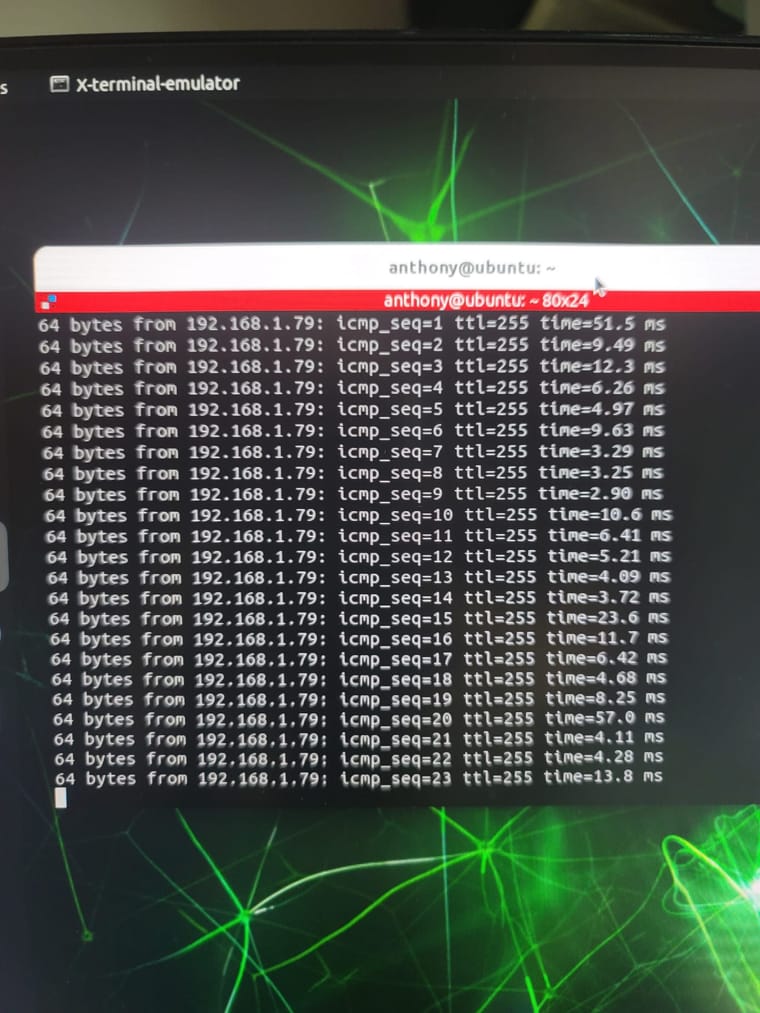
詳細: 我跟著教程5用windows燒錄了固件,最後也成功ping到 雷達的地址,接著用拓展教程2 完成了所有設定,可是最後卻反饋failed to turn on the lidar
anthony@ubuntu:~/ydlidar_ros2$ ros2 launch ydlidar ydlidar_launch.py [INFO] [launch]: All log files can be found below /home/anthony/.ros/log/2024-09-14-10-38-52-043155-ubuntu-29717 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [ydlidar_node-1]: process started with pid [29729] [INFO] [static_transform_publisher-2]: process started with pid [29731] [static_transform_publisher-2] [WARN] [1726281532.326946046] []: Old-style arguments are deprecated; see --help for new-style arguments [ydlidar_node-1] [YDLIDAR INFO] Current ROS Driver Version: 1.4.5 [static_transform_publisher-2] [INFO] [1726281532.361383537] [static_tf_pub_laser]: Spinning until stopped - publishing transform [static_transform_publisher-2] translation: ('0.020000', '0.000000', '0.000000') [static_transform_publisher-2] rotation: ('0.000000', '0.000000', '0.000000', '1.000000') [static_transform_publisher-2] from 'base_link' to 'laser_frame' [ydlidar_node-1] [YDLIDAR]:SDK Version: 1.4.5 [ydlidar_node-1] [YDLIDAR]:Lidar running correctly ! The health status: good [ydlidar_node-1] timout count: 1 [ydlidar_node-1] timout count: 2 [ydlidar_node-1] timout count: 1 [ydlidar_node-1] 281472560785632 thread has been canceled [ydlidar_node-1] [CYdLidar] Failed to turn on the Lidar, because the lidar is blocked or the lidar hardware is faulty. [ydlidar_node-1] [YDLIDAR INFO] Now YDLIDAR is stopping ....... [INFO] [ydlidar_node-1]: process has finished cleanly [pid 29729] ^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT) [static_transform_publisher-2] [INFO] [1726281607.981043452] [rclcpp]: signal_handler(signum=2) [INFO] [static_transform_publisher-2]: process has finished cleanly [pid 29731] -
-
@小鱼 是jetson ping到的
fishbot版的ip 是:192.168.1.79
jetson的ip是:192.168.1.207

-
@anoddy1999 雷达板的IP呢,两者要分开配哦,另外最好单独发帖,跟贴容易被吃掉
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
@154453683 感谢,问题解决
-
@小鱼 这个雷达转接板的源码用什么打开呢,我用plateformio打不开
-
@yongyong 看README
-
此回复已被删除! -
此回复已被删除! -
我在运行完代码开启rviz想查看雷达的scan,结果出现以下警告
code_text ros2 launch ydlidar ydlidar_launch.py [INFO] [launch]: All log files can be found below /home/shakima/.ros/log/2025-03-12-00-54-55-396599-shakim-vm-7822 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [ydlidar_node-1]: process started with pid [7833] [INFO] [static_transform_publisher-2]: process started with pid [7835] [ydlidar_node-1] [YDLIDAR INFO] Current ROS Driver Version: 1.4.5 [static_transform_publisher-2] [WARN] [1741712096.499273694] []: Old-style arguments are deprecated; see --help for new-style arguments [static_transform_publisher-2] [INFO] [1741712096.553863666] [static_tf_pub_laser]: Spinning until stopped - publishing transform [static_transform_publisher-2] translation: ('0.020000', '0.000000', '0.000000') [static_transform_publisher-2] rotation: ('0.000000', '0.000000', '0.000000', '1.000000') [static_transform_publisher-2] from 'base_link' to 'laser_frame' [ydlidar_node-1] [YDLIDAR]:SDK Version: 1.4.5 [ydlidar_node-1] [YDLIDAR]:Lidar running correctly ! The health status: good [ydlidar_node-1] [YDLIDAR] Connection established in [/dev/ttyUSB0][115200]: [ydlidar_node-1] Firmware version: 1.5 [ydlidar_node-1] Hardware version: 1 [ydlidar_node-1] Model: S4 [ydlidar_node-1] Serial: 2022010500000077 [ydlidar_node-1] [YDLIDAR]:Fixed Size: 370 [ydlidar_node-1] [YDLIDAR]:Sample Rate: 3K [ydlidar_node-1] [YDLIDAR INFO] Current Sampling Rate : 3K [ydlidar_node-1] [YDLIDAR INFO] Now YDLIDAR is scanning ...... [ydlidar_node-1] [WARN] [1741712151.422427968] [ydlidar_node]: New subscription discovered on topic '/scan', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY [ydlidar_node-1] [WARN] [1741712174.547511076] [ydlidar_node]: New subscription discovered on topic '/scan', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY [ydlidar_node-1] [WARN] [1741712184.172818572] [ydlidar_node]: New subscription discovered on topic '/scan', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY -
@zbohao7 在 拓展2:FishBot配套雷达驱动教程(源码版) 中说:
[ydlidar_node-1] [WARN] [1741712184.172818572] [ydlidar_node]: New subscription discovered on topic '/scan', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY
可以忽略,具体原因参考书籍第十章