小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
[FishBot教程] 6. 雷达驱动及建图测试
-
@小鱼 不好意思,这个没考虑到
-
@1281857896 这个参数是哪里来的
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 第17章建图与导航实践 fishbot导航实现 fishbot导航实现那块安装了nav2功能包,然后从功能包里复制出来的参数就这么多,我刚打开功能包确实是这些参数
复制的时候用的下面这个命令
cp /opt/ros/$ROS_DISTRO/share/nav2_bringup/params/nav2_params.yaml src/fishbot_navigation2/config -
@1281857896 你从快速上手教程里拷贝试试,或者直接用快速上手教程里的导航配置跑跑,看看能不能跑起来
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 有些参数不一样
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
amcl: ros__parameters: use_sim_time: False alpha1: 0.2 alpha2: 0.2 alpha3: 0.2 alpha4: 0.2 alpha5: 0.2 base_frame_id: "base_footprint" beam_skip_distance: 0.5 beam_skip_error_threshold: 0.9 beam_skip_threshold: 0.3 do_beamskip: false global_frame_id: "map" lambda_short: 0.1 laser_likelihood_max_dist: 2.0 laser_max_range: 100.0 laser_min_range: -1.0 laser_model_type: "likelihood_field" max_beams: 60 max_particles: 2000 min_particles: 500 odom_frame_id: "odom" pf_err: 0.05 pf_z: 0.99 recovery_alpha_fast: 0.0 recovery_alpha_slow: 0.0 resample_interval: 1 robot_model_type: "differential" save_pose_rate: 0.5 sigma_hit: 0.2 tf_broadcast: true transform_tolerance: 1.0 update_min_a: 0.2 update_min_d: 0.25 z_hit: 0.5 z_max: 0.05 z_rand: 0.5 z_short: 0.05 amcl_map_client: ros__parameters: use_sim_time: False amcl_rclcpp_node: ros__parameters: use_sim_time: False bt_navigator: ros__parameters: use_sim_time: False global_frame: map robot_base_frame: base_link odom_topic: /odom default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml" plugin_lib_names: - nav2_compute_path_to_pose_action_bt_node - nav2_follow_path_action_bt_node - nav2_back_up_action_bt_node - nav2_spin_action_bt_node - nav2_wait_action_bt_node - nav2_clear_costmap_service_bt_node - nav2_is_stuck_condition_bt_node - nav2_goal_reached_condition_bt_node - nav2_goal_updated_condition_bt_node - nav2_initial_pose_received_condition_bt_node - nav2_reinitialize_global_localization_service_bt_node - nav2_rate_controller_bt_node - nav2_distance_controller_bt_node - nav2_speed_controller_bt_node - nav2_recovery_node_bt_node - nav2_pipeline_sequence_bt_node - nav2_round_robin_node_bt_node - nav2_transform_available_condition_bt_node - nav2_time_expired_condition_bt_node - nav2_distance_traveled_condition_bt_node bt_navigator_rclcpp_node: ros__parameters: use_sim_time: False controller_server: ros__parameters: use_sim_time: False controller_frequency: 10.0 min_x_velocity_threshold: 0.001 min_y_velocity_threshold: 0.5 min_theta_velocity_threshold: 0.001 controller_plugins: ["FollowPath"] # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: 0.0 min_vel_y: 0.0 max_vel_x: 0.22 max_vel_y: 0.0 max_vel_theta: 0.8 min_speed_xy: 0.0 max_speed_xy: 0.44 min_speed_theta: 0.0 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x: 2.5 acc_lim_y: 0.0 acc_lim_theta: 0.2 decel_lim_x: -0.5 decel_lim_y: 0.0 decel_lim_theta: -0.5 vx_samples: 20 vy_samples: 0 vtheta_samples: 40 sim_time: 1.5 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.05 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.02 PathAlign.scale: 32.0 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 24.0 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 32.0 GoalDist.scale: 24.0 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0 controller_server_rclcpp_node: ros__parameters: use_sim_time: False local_costmap: local_costmap: ros__parameters: update_frequency: 5.0 publish_frequency: 2.0 global_frame: odom robot_base_frame: base_link use_sim_time: False rolling_window: true width: 3 height: 3 resolution: 0.05 robot_radius: 0.1 plugins: ["obstacle_layer", "voxel_layer", "inflation_layer"] inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" inflation_radius: 0.2 cost_scaling_factor: 3.0 obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" enabled: True observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" voxel_layer: plugin: "nav2_costmap_2d::VoxelLayer" enabled: True publish_voxel_map: True origin_z: 0.0 z_resolution: 0.05 z_voxels: 16 max_obstacle_height: 2.0 mark_threshold: 0 observation_sources: pointcloud pointcloud: topic: /intel_realsense_r200_depth/points max_obstacle_height: 2.0 clearing: True marking: True data_type: "PointCloud2" static_layer: map_subscribe_transient_local: True always_send_full_costmap: True local_costmap_client: ros__parameters: use_sim_time: False local_costmap_rclcpp_node: ros__parameters: use_sim_time: False global_costmap: global_costmap: ros__parameters: update_frequency: 1.0 publish_frequency: 1.0 global_frame: map robot_base_frame: base_link use_sim_time: False robot_radius: 0.1 resolution: 0.05 plugins: ["static_layer", "obstacle_layer", "voxel_layer", "inflation_layer"] obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" enabled: True observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" voxel_layer: plugin: "nav2_costmap_2d::VoxelLayer" enabled: True publish_voxel_map: True origin_z: 0.0 z_resolution: 0.05 z_voxels: 16 max_obstacle_height: 2.0 mark_threshold: 0 observation_sources: pointcloud pointcloud: topic: /intel_realsense_r200_depth/points max_obstacle_height: 2.0 clearing: True marking: True data_type: "PointCloud2" static_layer: plugin: "nav2_costmap_2d::StaticLayer" map_subscribe_transient_local: True inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" cost_scaling_factor: 1.0 inflation_radius: 0.55 always_send_full_costmap: True global_costmap_client: ros__parameters: use_sim_time: False global_costmap_rclcpp_node: ros__parameters: use_sim_time: False map_server: ros__parameters: use_sim_time: False yaml_filename: "turtlebot3_world.yaml" map_saver: ros__parameters: use_sim_time: False save_map_timeout: 5000 free_thresh_default: 0.25 occupied_thresh_default: 0.65 planner_server: ros__parameters: expected_planner_frequency: 20.0 use_sim_time: False planner_plugins: ["GridBased"] GridBased: plugin: "nav2_navfn_planner/NavfnPlanner" tolerance: 0.5 use_astar: false allow_unknown: true planner_server_rclcpp_node: ros__parameters: use_sim_time: False recoveries_server: ros__parameters: costmap_topic: local_costmap/costmap_raw footprint_topic: local_costmap/published_footprint cycle_frequency: 10.0 recovery_plugins: ["spin", "backup", "wait"] spin: plugin: "nav2_recoveries/Spin" backup: plugin: "nav2_recoveries/BackUp" wait: plugin: "nav2_recoveries/Wait" global_frame: odom robot_base_frame: base_link transform_timeout: 0.1 use_sim_time: False simulate_ahead_time: 2.0 max_rotational_vel: 1.0 min_rotational_vel: 0.4 rotational_acc_lim: 3.2 robot_state_publisher: ros__parameters: use_sim_time: False -
@小鱼 鱼哥,用最新的底板固件加上快速上手里面的fishbot.yaml可以很好实现导航,用那个fishbot_nav2.yaml就会加载不出地图,跑不了,应该是有缺东西
-
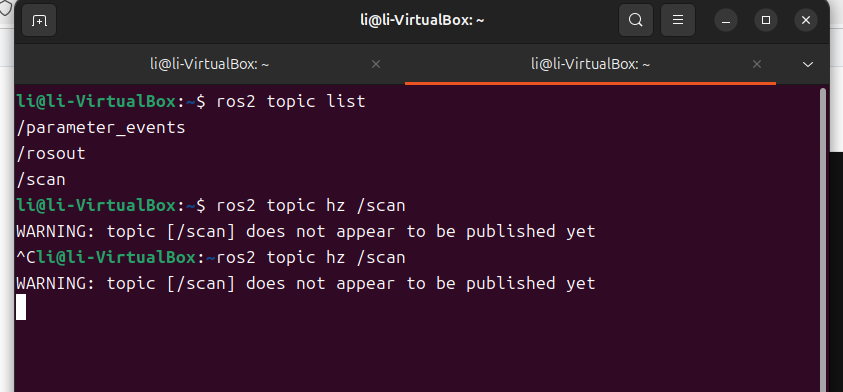
第三步,话题里面有scan,但出现警告是怎么回事

-
@1281857896 对比下文件区别,可能哪里不对劲的
-
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
-
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
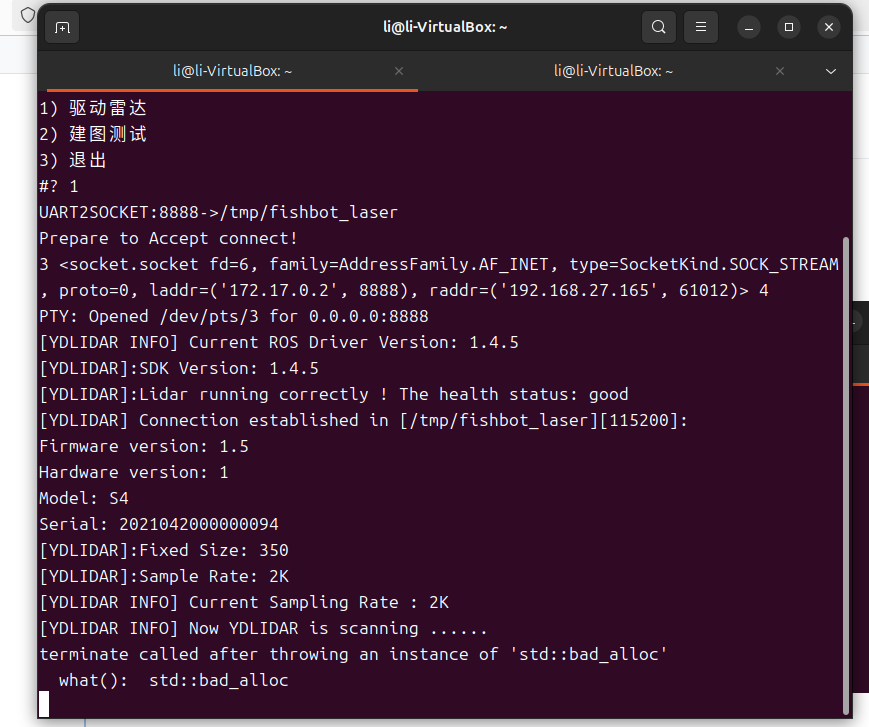
@775405893 雷达驱动意外挂了,重新运行下试试
-
@小鱼 ubuntu 24 ,ros2是jazzy版,虚拟机桥接,雷达连的电脑热点。重启了一下还是这个问题,雷达地址能ping通。
-
@775405893 估计是版本问题,docker里面是22.04的,最好主机也用22.04,教程也是22.04的,还会有坑等着你。你那里有书吗,书上有源码驱动雷达的方法,只能用这个了,或者你需要等一段时间(半个月左右),我抽空时间来适配下24.04系统。
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 好的谢谢,有书,我现在去翻一下

-
@775405893 第九章,你找找
-
在ARM64架构下,ubuntu humble虚拟机
zhao@zhao-virtual-machine:~$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 fishros2/fishbot_laser
access control disabled, clients can connect from any host
WARNING: The requested image's platform (linux/amd64) does not match the detected host platform (linux/arm64/v8) and no specific platform was requested
exec /bin/bash: exec format error
请问小鱼有没有解决办法,有没有类似 miroros agent 的离线解决方案? -
@466413819 arm架构下不支持这个镜像,需要按照
拓展1:FishBot配套雷达驱动教程(源码版)
拓展2:树莓派上使用micros-agent驱动主控板的方法
拓展3:FishBot 树莓派配置建图导航