[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
@深海 没得选直接输入也行
-
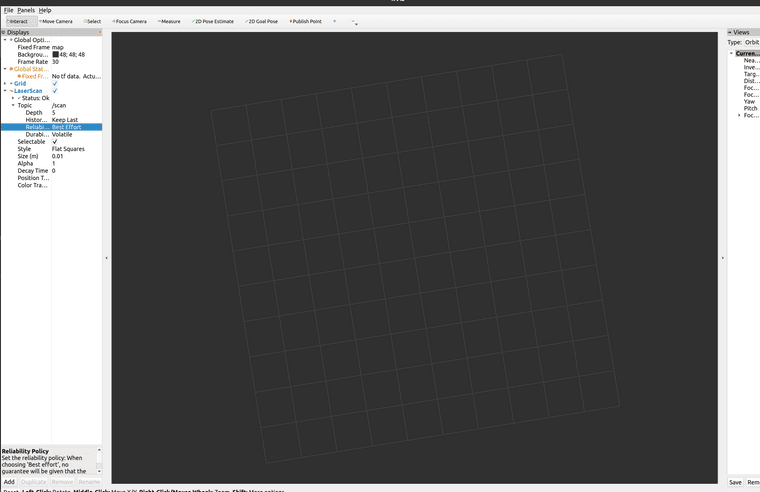
@小鱼 但是rviz里没有东西
-
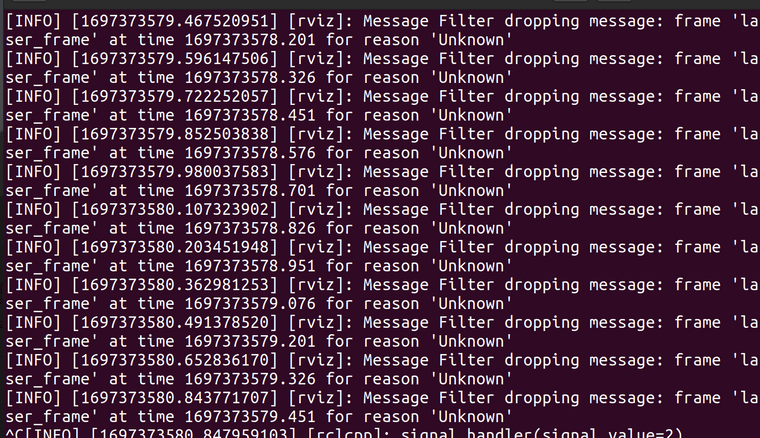
@深海 终端里会报这个
-
@深海 给下上下文
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼 在用键盘控制小车移动的时候,小车可以正常运动,但是rviz里显示不出里程计
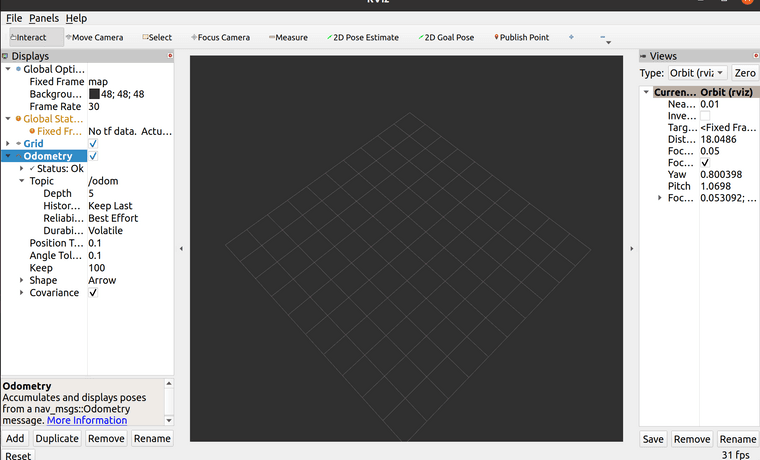
然后rviz的终端会报这个信息
在雷达驱动的时候也有这种情况,rviz里没有显示信息
Message Filter dropping message: frame 'laser_frame' at time 4328.021 for reason unknow
这是为啥
ubuntu20.04 foxy -
@深海 你的 fixed frame 都是错误的,按照教程修改
-
@小鱼 好的感谢,之前理解错意思了
-
这个怎么解决呢
-
-
@948287217 20用foxy版本试试
-
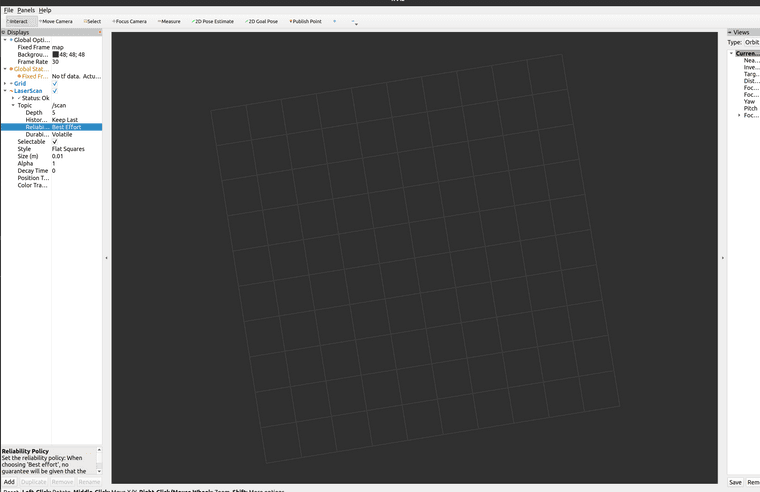
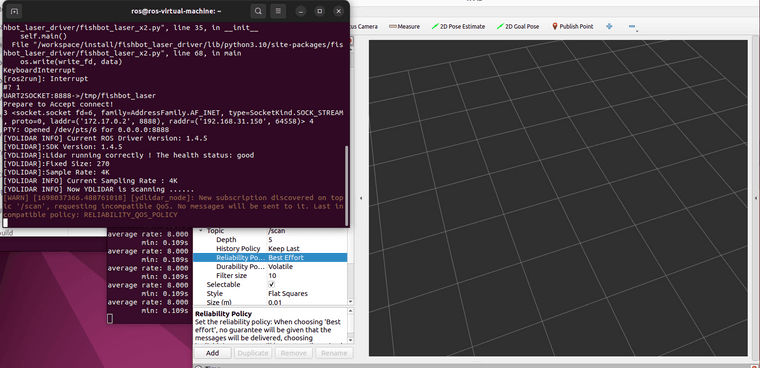
小鱼哥,我按照教程做下来的,打开可视图的时候就显示黄色字的错误,然后改成Best Effort之后,移动雷达没有出现点云数据,这是怎么回事?
-
@1740580485 这两步你为什么不做?

-
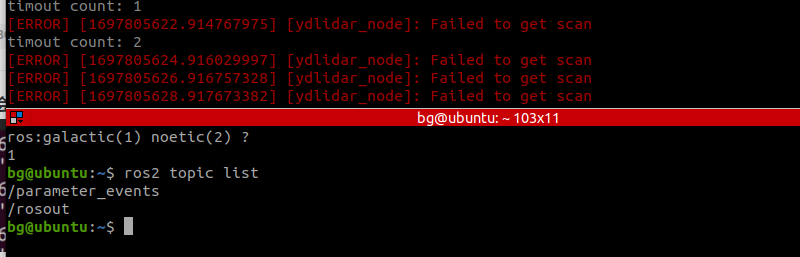
能ping通ip,但是UART2SOCKET:8888->/tmp/fishbot_laser
一直卡在Prepare to Accept connect! -
@13768252287 1.检查雷达模式 2.检查网络 客服发送的资料里有一个常见问题解答,其中讲解了网络相关的问题,能ping通不一定可以通信
-
@1461307079 我的也不能连接,桥接模式怎么设置的?VMware16 没找到虚拟网络编辑器。
-
虚拟机上运行乌班图22.04,net连接。始终无法连接成功。 -
@2826778595 找客服要一下常见问题解答视频,其实需要的网络结构很简单的
-
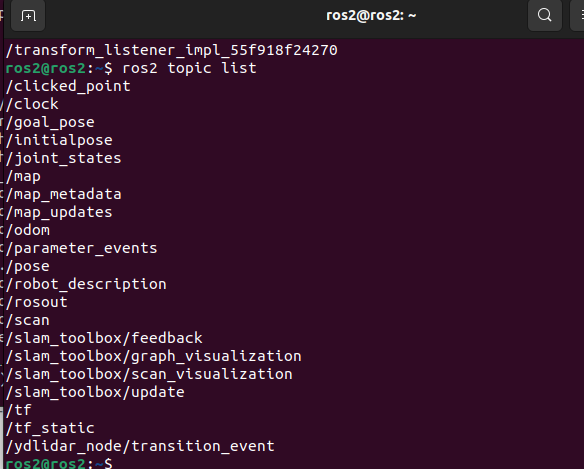
这边准备建图的时候发现cmd_vel话题突然不见了 就很奇怪
-
保存地图出现
/opt/ros/humble/lib/nav2_map_server/map_saver_cli: symbol lookup error: /opt/ros/humble/lib/libmap_server_core.so: undefined symbol: _ZN9nav2_util13LifecycleNode18on_rcl_preshutdownEv
[ros2run]: Process exited with failure 127 -
@小鱼 看到客服资料了,已经解决。谢谢。
是网络通信的问题。我是通过虚拟机装的ubantu,想让板子和电脑通信需要设置桥接模式。但是,我设置桥接无网络,所以迟迟无法实现通信。最后,通过外接固态U盘,装了双系统,重新配置后,无需桥接直接实现通信。视频资料里的问题解答,解决了几乎所有我之前我遇到的头疼问题。呜呜,发现晚了。