小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
[FishBot教程]4.使用ROS2键盘控制FishBot
-
@2496480233 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
ros2 topic echo /odom 这样子
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
ros2 topic echo /odom
tapapia@ubuntu:~$ ros2 topic echo /odom Could not determine the type for the passed topic还是不行

-
@2496480233 单独发个贴吧,了解下上下文
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@921203724 如果使用的是手机热点的话,建议把手机放在车子上,我今天就是,小车只能接收到一个指令,且反应很慢,后来把手机放在车子上就可以了,可能是网络信号的原因。
-
@小鱼 鱼哥,我的小车,使用键盘控制时只会转弯(一个轮子动),前进后退以及停止都不会响应,我发布一个
ros2 topic pub /cmd_vel geometry_msgs/msg/Twist "linear:x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
publisher: beginning loop
publishing #1: geometry_msgs.msg.Twist(linear=geometry_msgs.msg.Vector3(x=1.0, y=0.0, z=0.0), angular=geometry_msgs.msg.Vector3(x=0.0, y=0.0, z=0.0))
只有一个轮子会动。。。 -
@229102432 经检查,最新固件问题,回退固件 可解决
-
这里改成
index应该就可以了,麻烦修复了 -
@d4nk3n 已修复
-
此回复已被删除! -
@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
ros2 topic echo /odom pose.pose
ros2 topic echo /odom pose.pose
The passed message type is invalid
... -
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 为啥我输入ros2 topic echo /odom,这么显示
-
@1740580485 就是这么显示的,除非过滤消息只显示pose
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 要是加上pose的话,显示错误了
-
@1740580485 你用的什么指令?报什么错误?
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 小鱼大佬,可以出一个小车一边走一边显示路径的教程吗,我在 csdn 搜索了好多教程,知道应该是要发布 path 话题,可是不知道里面应该怎么写,不太会写代码头太大了。
-
@小鱼 就是在 rviz2 里可视化的看见小车行驶的轨迹,感觉逻辑上不难,可是就是不知道该咋操作,真的求助!
-
@1921988106 显示很简单,记得在RobotModel插件里打开一个选项就可以了
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 好的大佬,我再试试,不行的话,我单独发个贴求助
-
@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
ros2 topic echo /odom pose.pose
如何获取准确的里程计信息呢,
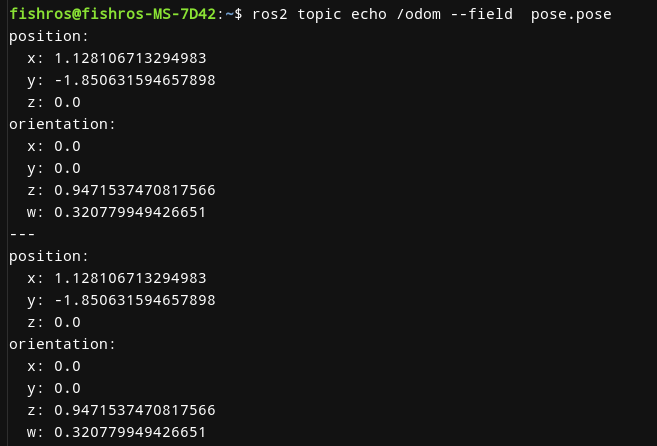 像你这样的就可以。我输入你的指令显示无效,输入ros2 topic echo /odom的话,信息太杂乱了,你有解决的方法嘛
像你这样的就可以。我输入你的指令显示无效,输入ros2 topic echo /odom的话,信息太杂乱了,你有解决的方法嘛
