{kind=link}
0a8915de-36bc-4427-93aa-adc66e8f6b7c-image.png
标题:机械臂在gazebo里面仿真,rviz里面的姿态和gazebo不一样(ros2 humble,gazebo classic)
背景(可选):
我目前正在学习通过ros2驱动机械臂实现抓取的功能,目前的阶段是想实现在gazebo里面进行仿真
问题描述: 我想要在gazebo里面进行仿真,实现机械臂末端有夹爪能够夹取东西,但是目前在rivz里面显示的效果和在gazebo里面是不一样的,问题就是gazebo显示的画面里,桌子是一直抖动的状态,机械臂在gazebo里面也是瘫软无力的,需要怎么解决 具体细节和上下文:f10fd21d-2d92-41f3-97a9-100c4bea9319-image.png
3420f2c2-016d-4da3-91b7-1fb866d945f5-image.png
具体的就是修改了urdf文件,修改了桌子的惯性参数,但是也不确定自己修改的是不是对的,问过老师,老师说我需要添加controller,但是也不知道做,没有一个大体的思路
e1d744a8-c2f1-4092-a3c9-63c5000e7532-ccadef6b-38e3-4d46-a578-a643ddc21c77.png
下面是我的代码
import launch
import launch_ros
from ament_index_python.packages import get_package_share_directory
import os
import launch_ros.parameter_descriptions
def generate_launch_description():
urdf_package_path=get_package_share_directory('fishbot_description')
default_urdf_path=os.path.join(urdf_package_path,'urdf','first_robot.urdf')
请问,ROS2 humble能否设置日志文件大小且实现轮转,就是存储日志到文件到达一定大小后,新建文件存储后续内容
ros2 FollowWaypoints action server is not available (ros2 foxy版本 ubuntu20)
但ros2命令执行发现 FollowWaypoint 的node action service都在
而且rviz2是可以做导航的。(按钮驱动)
用的是navigation2 (humble的)
主要代码如下:
from geometry_msgs.msg import PoseStamped
from nav2_simple_commander.robot_navigator import BasicNavigator, TaskResult
import rclpy
from rclpy.duration import Duration
import tf_transformations
def main():
rclpy.init()
雷达自带imu,机器人自身也有配imu,当前雷达是倾斜放置的,为了有一定高度同时探测地面低矮的障碍物,尝试了一些配置,有以下问题
1:如果tracking_frame配置为base_link,会报错,要求imu的frame id和base_link不能离太远,3d建图配置里没找到哪里可以禁用imu
2:如果tracking_frame配置为imu的frame id,则rviz中map会倾斜,导致地图都是灰色或黑色
两个imu都没有和base_link重合
0a8915de-36bc-4427-93aa-adc66e8f6b7c-image.png
请教大家个问题,在ros2的导航配置文件中,如何对规划好的全局路径进行平滑优化呢?如何在BT行为树中添加smoother_path节点?
就是我用 nc -l 8889 小车不会显示 hello fishros 然后我看雷达板上 的ip 也没了 #
标题:使用一键安装过程中遇到程序崩溃
Traceback (most recent call last): File "/tmp/fishinstall/install.py", line 134, in <module> main() File "/tmp/fishinstall/install.py", line 60, in main from tools.base import CmdTask,FileUtils,PrintUtils,ChooseTask,ChooseWithCategoriesTask,Tracking ImportError: cannot import name 'CmdTask' from 'tools.base' (/tmp/fishinstall/tools/base.py)4d00eb253db5251d8d9e682f7445fac.png
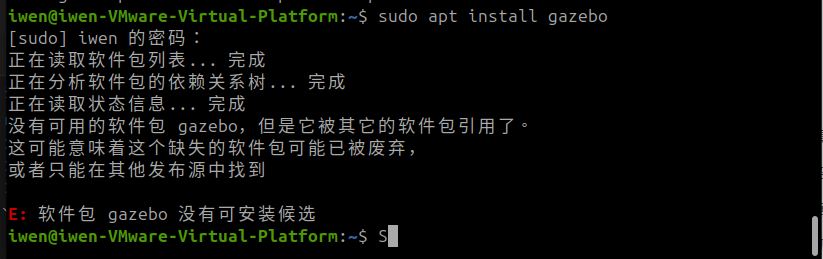
6.4.2 安装sudo apt install ros-$ROS_DISTRO-gazebo-ros-pkgs这个功能包的时候安装失败,是不是安装包被删除了啊
3d1f36c5-d9ea-4f6c-ad93-218f527fd241-449647d2b480ebcc08d674dba2c2dee.png
应该是gpu方面gazebo和wsl2有冲突,实测把gazebo换成cpu渲染可以正常运行,但一运行cpu占用就90%,电脑风扇呼呼响,不是个办法,想问下有大佬知道怎么办吗
具体报错信息为[Err] [Model.cc:1160] Exception occured in the Load function of plugin with name[gazebo_ros2_control] and filename[libgazebo_ros2_control.so]. This plugin will not run.
[ERROR] [gzserver-2]: process has died [pid 4992, exit code -11, cmd 'gzserver /home/sy/ros2/chapt6/chapt6_ws/install/fishbot_description/share/fishbot_description/world/custom_room.world --verbose -slibgazebo_ros_init.so -slibgazebo_ros_factory.so -slibgazebo_ros_force_system.so'].
[gzserver-2]
不启用这个插件就不会报错,fishbot.ros2_control.xacro中的代码:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="fishbot_ros2_control">
<ros2_control name="FishBotGazeboSystem" type="system">
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<joint name="left_wheel_joint">
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
<joint name="right_wheel_joint">
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
</ros2_control>
<gazebo>
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<parameters>$(find fishbot_description)/config/fishbot_ros2_controller.yaml</parameters>
</plugin>
</gazebo>
</xacro:macro>
</robot>
fishbot_ros2_controller.yaml:
controller_manager:
ros__parameters:
update_rate: 100.0
use_sim_time: true
使用鱼哥第七章的fishbot_navigation2功能包想做实体小车导航。问题是2D pose estimate后全局代价地图和局部代价地图始终不显示,请鱼哥和各位大佬看看我朝哪个方向排查:
详细描述如下:
1.版本:ROS2 jazzy ubuntu24.04 树莓派5。激光雷达是实体单线雷达 自己搓的麦轮小车,能发布里程计(自己测试还挺准的)
2.使用里程计小车能找到自己的位置,配合雷达能完成家里客厅的简单建图
3.nav2_params.yaml 和 navigation2.launch.py(这个launch里调用了nav2_bringup,传参是map_yaml_path,use_sim_time,和yaml文件路径)是在鱼哥的基础上改的,主要修改的1)use_sim_time: False 2)没有URDF,所以发布了一个 1hz的base_footprint->base_link->laser的TF 3)其他小的参数改动
4.运行navigation2.launch.py后,查看TF都正常,2Dpose estimate后能看到周围有粒子(看样子负责定位的自适应蒙特卡洛粒子滤波起作用了),但是代价地图(全局 局部)都不显示 代价地图模块说no map received
5.显然在代价地图说收不到map的情况下点NAV2 GOAL也是无效的 terminal说 没有设置起始位置(但是其实我设置了)
6 补充:我在目前的基础上丧心病狂的再运行一下ros2 launch nav2_bringup navigation_launch.py 代价地图就有了(代价有点大 我家客厅有点小😕 ),但是NAV2 GOAL还是失败
请各位大佬指点一二,帮我看看我的问题可能在哪:
**问题1 我没有代价地图的问题可能在哪?
初始位置没设置对?(AMCL模块正常,TF显示map->odom)
代价地图的YAML没配置对?(我跑鱼哥的yaml仿真能跑,仅仅改了footprint坐标系和仿真时间)
为什么我运行ros2 launch nav2_bringup navigation_launch.py 能出代价地图?
问题2 我运行ros2 launch nav2_bringup navigation_launch.py 显然是不应该有的做法,让节点重复发布了。这时候不能导航仅仅是因为节点重复发布的原因吗?还是我还有一些别的没做对?**
Screenshot 2025-06-29 121845.png
这是点2d pose estimate后的结果
Screenshot 2025-06-29 134036.png
这是此时的TF
TOPIC_RQT.png
这是此时的节点
状态反馈qt.png
这是小车反馈信息 里程计发布应该都正常(这个图是我后截取的,用遥控器控制小车 确认小车发布的里程计有效)
问题描述.png
这个是再没有代价地图的情况下强行点NAV2GOAL的结果
Screenshot 2025-06-29 143155.png
这个是运行一遍ros2 launch nav2_bringup navigation_launch.py 后的结果,注意此时节点几乎都存在两个同名节点,不知道不能导航是否和同名节点有关,但是起码运行这个显示代价地图了
Screenshot 2025-06-29 143330.png
这个是在运行ros2 launch nav2_bringup navigation_launch.py后有代价地图 点NAV2 goal的结果
下面是我的nav2_params.yaml
amcl:
ros__parameters:
use_sim_time: False
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
bt_navigator:
ros__parameters:
use_sim_time: False
global_frame: map
robot_base_frame: base_footprint
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_smooth_path_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_assisted_teleop_action_bt_node
- nav2_back_up_action_bt_node
- nav2_drive_on_heading_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_globally_updated_goal_condition_bt_node
- nav2_is_path_valid_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_truncate_path_local_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_path_expiring_timer_condition
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_goal_updated_controller_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
- nav2_controller_cancel_bt_node
- nav2_path_longer_on_approach_bt_node
- nav2_wait_cancel_bt_node
- nav2_spin_cancel_bt_node
- nav2_back_up_cancel_bt_node
- nav2_assisted_teleop_cancel_bt_node
- nav2_drive_on_heading_cancel_bt_node
- nav2_is_battery_charging_condition_bt_node
bt_navigator_navigate_through_poses_rclcpp_node:
ros__parameters:
use_sim_time: False
bt_navigator_navigate_to_pose_rclcpp_node:
ros__parameters:
use_sim_time: False
controller_server:
ros__parameters:
use_sim_time: False
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
transform_tolerance: 1.0
global_frame: odom
robot_base_frame: base_footprint
use_sim_time: False
rolling_window: true
static_map: true
width: 1
height: 1
resolution: 0.05
robot_radius: 0.22
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.25
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
map_topic: /map
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
always_send_full_costmap: True
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
map_topic: /map
global_frame: map
robot_base_frame: base_footprint
use_sim_time: False
robot_radius: 0.12
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
map_topic: /map
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
track_unknown_space: true
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.25
always_send_full_costmap: True
map_server:
ros__parameters:
use_sim_time: False
topic_name: "map"
# Overridden in launch by the "map" launch configuration or provided default value.
# To use in yaml, remove the default "map" value in the tb3_simulation_launch.py file & provide full path to map below.
yaml_filename: ""
map_saver:
ros__parameters:
use_sim_time: False
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: True
planner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: False
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: true
smoother_server:
ros__parameters:
use_sim_time: False
smoother_plugins: ["simple_smoother"]
simple_smoother:
plugin: "nav2_smoother::SimpleSmoother"
tolerance: 1.0e-10
max_its: 1000
do_refinement: True
behavior_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
behavior_plugins: ["spin", "backup", "drive_on_heading", "assisted_teleop", "wait"]
spin:
plugin: "nav2_behaviors/Spin"
backup:
plugin: "nav2_behaviors/BackUp"
drive_on_heading:
plugin: "nav2_behaviors/DriveOnHeading"
wait:
plugin: "nav2_behaviors/Wait"
assisted_teleop:
plugin: "nav2_behaviors/AssistedTeleop"
global_frame: odom
robot_base_frame: base_footprint
transform_tolerance: 0.1
use_sim_time: False
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
robot_state_publisher:
ros__parameters:
use_sim_time: False
waypoint_follower:
ros__parameters:
use_sim_time: False
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200
velocity_smoother:
ros__parameters:
use_sim_time: False
smoothing_frequency: 20.0
scale_velocities: False
feedback: "OPEN_LOOP"
max_velocity: [0.26, 0.0, 1.0]
min_velocity: [-0.26, 0.0, -1.0]
max_accel: [2.5, 0.0, 3.2]
max_decel: [-2.5, 0.0, -3.2]
odom_topic: "odom"
odom_duration: 0.1
deadband_velocity: [0.0, 0.0, 0.0]
velocity_timeout: 1.0
下面是navigation2.launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, ExecuteProcess, TimerAction
from launch.substitutions import LaunchConfiguration
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
# 获取包路径
fishbot_navigation2_dir = get_package_share_directory('fishbot_navigation2')
nav2_bringup_dir = get_package_share_directory('nav2_bringup')
请各位帮忙看看,卡很久了这里 GPT给的方法几乎都试了,无果。
我尝试使用robot_localization库去融合odom和imu的数据,来减少误差,但是这个方法只能用在一个机器人上,多个机器人的时候,分配了命名空间,robot_localization会直接不订阅任何odom和imu数据,不工作了,这种情况有什么办法解决
听小鱼的视频教程是说要配置dds 外加代码上稍微修改。
而网上其他的一些说法是,ros2 默认就支持了共享内存的方式,而且是根据消息的大小来自行决定的。
这两个说法到底哪个是对的?
由于我的虚拟机没有代理,不好使用
vcs import < moveit2_tutorials/moveit2_tutorials.repos所以,我在另外一个双系统的有代理的linux下运行后,拷贝过来,编译发现了如下问题
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release Starting >>> moveit_resources_panda_description Starting >>> moveit_common Finished <<< moveit_common [0.77s] Starting >>> moveit_resources_pr2_description Finished <<< moveit_resources_panda_description [1.26s] Starting >>> srdfdom Finished <<< moveit_resources_pr2_description [1.10s] Starting >>> moveit_resources_panda_moveit_config Finished <<< moveit_resources_panda_moveit_config [0.93s] Starting >>> launch_param_builder Finished <<< launch_param_builder [1.59s] Starting >>> moveit_resources_fanuc_description Finished <<< moveit_resources_fanuc_description [1.64s] Starting >>> moveit_resources_fanuc_moveit_config Finished <<< moveit_resources_fanuc_moveit_config [1.57s] Starting >>> moveit_resources_prbt_support Finished <<< moveit_resources_prbt_support [1.58s] Starting >>> moveit_task_constructor_msgs Finished <<< srdfdom [23.4s] Starting >>> moveit_core [Processing: moveit_core, moveit_task_constructor_msgs] Finished <<< moveit_task_constructor_msgs [52.4s] Starting >>> moveit_configs_utils Finished <<< moveit_configs_utils [1.16s] Starting >>> rviz_marker_tools Finished <<< rviz_marker_tools [11.4s] Starting >>> rosparam_shortcuts --- stderr: rosparam_shortcuts CMake Error at CMakeLists.txt:97 (find_package): By not providing "Findros_testing.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "ros_testing", but CMake did not find one. Could not find a package configuration file provided by "ros_testing" with any of the following names: ros_testingConfig.cmake ros_testing-config.cmake Add the installation prefix of "ros_testing" to CMAKE_PREFIX_PATH or set "ros_testing_DIR" to a directory containing one of the above files. If "ros_testing" provides a separate development package or SDK, be sure it has been installed. --- Failed <<< rosparam_shortcuts [1.89s, exited with code 1] Aborted <<< moveit_core [7min 52s] Summary: 12 packages finished [8min 17s] 1 package failed: rosparam_shortcuts 1 package aborted: moveit_core 1 package had stderr output: rosparam_shortcuts 41 packages not processed请问大家有什么好办法解决吗?
5a461d09-758f-446d-ba16-f5fcb098bce7-image.png
系统
Ubuntu22.04
使用的是小鱼的一键配置docker环境
ROS版本
humble
跟着小鱼教学视频做的第六章的小车,camera、laser、IMU在rivz里显示的xyz偏移和设置的不一样,但是点开显示他们的惯性和质量却都是正确的。图里可见红色的惯性方块,是正确的,但是黑色实体的却飞出去了。
<?xml version="1.0"?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro" > <xacro:include filename="$(find fishbot_description)/urdf/fishbot/common_inertia.xacro"/> <!--机器人身体部分--> <xacro:macro name = "camera_xacro" params="xyz"> <link name="camera_link"> <!--部件外观描述--> <visual> <!--偏移和旋转--> <origin xyz="${xyz}" rpy="0.0 0.0 0.0"/> <!--形状--> <geometry> <box size="0.02 0.1 0.02"/> </geometry> <!--颜色--> <material name = "black"> <color rgba="0 0 0 0.5"/> </material> </visual> <collision> <origin xyz="${xyz}" rpy="0.0 0.0 0.0"/> <!--形状--> <geometry> <box size="0.02 0.1 0.02"/> </geometry> <!--颜色--> <material name = "black"> <color rgba="0 0 0 0.5"/> </material> </collision> <xacro:box_inertia m="0.1" w="0.02" h="0.1" d="0.02"/> </link> <joint name="camera_joint" type="fixed"> <origin xyz="${xyz}" rpy="0.0 0.0 0.0"/> <parent link="base_link"/> <child link="camera_link"/> </joint> </xacro:macro> </robot>Ubuntu24.04安装gazebo11报错,not found
屏幕截图 2025-06-26 131548.png
[gazebo-2] [INFO] [1750837900.118069351] [controller_manager]: Loading controller : 'joint_state_broadcaster' of type 'joint_state_broadcaster/JointStateBroadcaster'
[gazebo-2] [INFO] [1750837900.118141039] [controller_manager]: Loading controller 'joint_state_broadcaster'
[gazebo-2] [INFO] [1750837900.122911144] [controller_manager]: Controller 'joint_state_broadcaster' node arguments: --ros-args --params-file -p use_sim_time:=true --param use_sim_time:=true
[gazebo-2] [ERROR] [1750837900.123114534] [controller_manager]: Caught exception of type : N6rclcpp10exceptions22RCLInvalidROSArgsErrorE while initializing controller 'joint_state_broadcaster': failed to parse arguments: Couldn't parse params file: '--params-file -p'. Error: Error opening YAML file, at ./src/parser.c:271, at ./src/rcl/arguments.c:415
[spawner-5] [FATAL] [1750837900.144238134] [spawner_joint_state_broadcaster]: Failed loading controller joint_state_broadcaster
yaml文件路径没有问题 yaml文件本身也没有问题 controller_manager服务可以正常启动。但是每次加载控制器都会出现这个问题。
e731bd1d-c00e-43a6-9d07-1336e7a9928f-29b88290-3331-4b61-9823-79dd85d62759.png
版块
-
1.3k
主题4.8k
帖子 -
444
主题2.9k
帖子 -
66
主题259
帖子 -
1.1k
主题4.3k
帖子 -
995
主题3.6k
帖子 -
5
主题11
帖子 -
358
主题1.6k
帖子