{kind=link}
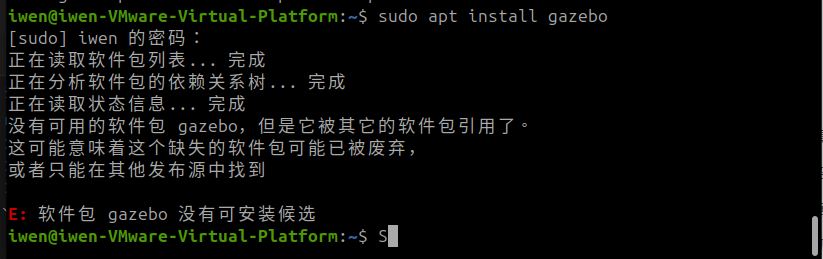
Ubuntu24.04安装gazebo11报错,not found
屏幕截图 2025-06-26 131548.png
Ubuntu24.04安装gazebo11报错,not found
屏幕截图 2025-06-26 131548.png
[gazebo-2] [INFO] [1750837900.118069351] [controller_manager]: Loading controller : 'joint_state_broadcaster' of type 'joint_state_broadcaster/JointStateBroadcaster'
[gazebo-2] [INFO] [1750837900.118141039] [controller_manager]: Loading controller 'joint_state_broadcaster'
[gazebo-2] [INFO] [1750837900.122911144] [controller_manager]: Controller 'joint_state_broadcaster' node arguments: --ros-args --params-file -p use_sim_time:=true --param use_sim_time:=true
[gazebo-2] [ERROR] [1750837900.123114534] [controller_manager]: Caught exception of type : N6rclcpp10exceptions22RCLInvalidROSArgsErrorE while initializing controller 'joint_state_broadcaster': failed to parse arguments: Couldn't parse params file: '--params-file -p'. Error: Error opening YAML file, at ./src/parser.c:271, at ./src/rcl/arguments.c:415
[spawner-5] [FATAL] [1750837900.144238134] [spawner_joint_state_broadcaster]: Failed loading controller joint_state_broadcaster
yaml文件路径没有问题 yaml文件本身也没有问题 controller_manager服务可以正常启动。但是每次加载控制器都会出现这个问题。
e731bd1d-c00e-43a6-9d07-1336e7a9928f-29b88290-3331-4b61-9823-79dd85d62759.png
电脑是ARM架构,win11,使用了清华源。在wsl里进行一键安装,ros2humble失败,请问怎么样解决啊
--2025-06-25 10:22:23-- http://fishros.com/install Resolving fishros.com (fishros.com)... 47.119.165.169 Connecting to fishros.com (fishros.com)|47.119.165.169|:80... connected. HTTP request sent, awaiting response... 301 Moved Permanently Location: http://fishros.com/install/ [following] --2025-06-25 10:22:23-- http://fishros.com/install/ Reusing existing connection to fishros.com:80. HTTP request sent, awaiting response... 200 OK Length: 960 [application/octet-stream] Saving to: ‘fishros’ fishros 100%[=================================================>] 960 --.-KB/s in 0s 2025-06-25 10:22:23 (47.9 MB/s) - ‘fishros’ saved [960/960] Reading package lists... Done Building dependency tree... Done Reading state information... Done python3-distro is already the newest version (1.7.0-1). python3-yaml is already the newest version (5.4.1-1ubuntu1). The following packages were automatically installed and are no longer required: acl adwaita-icon-theme alsa-topology-conf alsa-ucm-conf at-spi2-core cpu-checker dconf-gsettings-backend dconf-service fontconfig glib-networking glib-networking-common glib-networking-services gsettings-desktop-schemas gstreamer1.0-plugins-base gstreamer1.0-x gtk-update-icon-cache hicolor-icon-theme humanity-icon-theme ibverbs-providers ipxe-qemu ipxe-qemu-256k-compat-efi-roms libaa1 libaio1 libasound2 libasound2-data libasyncns0 libatk-bridge2.0-0 libatk1.0-0 libatk1.0-data libatspi2.0-0 libavahi-client3 libavahi-common-data libavahi-common3 libavc1394-0 libboost-iostreams1.74.0 libboost-thread1.74.0 libbrlapi0.8 libcaca0 libcacard0 libcairo-gobject2 libcairo2 libcdparanoia0 libcolord2 libcups2 libdatrie1 libdaxctl1 libdconf1 libdecor-0-0 libdecor-0-plugin-1-cairo libdv4 libepoxy0 libfdt1 libflac8 libgbm1 libgdk-pixbuf-2.0-0 libgdk-pixbuf2.0-bin libgdk-pixbuf2.0-common libgfapi0 libgfrpc0 libgfxdr0 libglusterfs0 libgraphite2-3 libgstreamer-plugins-base1.0-0 libgstreamer-plugins-good1.0-0 libgtk-3-0 libgtk-3-bin libgtk-3-common libgudev-1.0-0 libharfbuzz0b libibverbs1 libiec61883-0 libiscsi7 libjack-jackd2-0 liblcms2-2 libmp3lame0 libmpg123-0 libndctl6 libnl-route-3-200 libnspr4 libnss3 libogg0 libopus0 liborc-0.4-0 libpango-1.0-0 libpangocairo-1.0-0 libpangoft2-1.0-0 libpcsclite1 libpixman-1-0 libpmem1 libpmemobj1 libproxy1v5 libpulse0 librados2 libraw1394-11 librbd1 librdmacm1 librsvg2-2 librsvg2-common libsamplerate0 libsdl2-2.0-0 libshout3 libslirp0 libsndfile1 libspeex1 libspice-server1 libtag1v5 libtag1v5-vanilla libthai-data libthai0 libtheora0 libtwolame0 libusbredirparser1 libv4l-0 libv4lconvert0 libvirglrenderer1 libvisual-0.4-0 libvorbis0a libvorbisenc2 libvpx7 libvte-2.91-0 libvte-2.91-common libwavpack1 libwayland-client0 libwayland-cursor0 libwayland-egl1 libwayland-server0 libxcb-render0 libxcursor1 libxdamage1 libxkbcommon0 ovmf seabios session-migration ubuntu-mono Use 'sudo apt autoremove' to remove them. 0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded. --2025-06-25 10:22:25-- http://mirror.fishros.com/install/tools/base.py Resolving mirror.fishros.com (mirror.fishros.com)... 47.119.165.169 Connecting to mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80... connected. HTTP request sent, awaiting response... 200 OK Length: 51510 (50K) [application/octet-stream] Saving to: ‘/tmp/fishinstall//tools/base.py’ /tmp/fishinstall//tools/base. 100%[=================================================>] 50.30K --.-KB/s in 0.1s 2025-06-25 10:22:25 (398 KB/s) - ‘/tmp/fishinstall//tools/base.py’ saved [51510/51510] Run CMD Task:[dpkg --print-architecture] [-][0.00s] CMD Result:success Run CMD Task:[wget http://mirror.fishros.com/install/tools/translation/translator.py -O /tmp/fishinstall//tools/translation/translator.py --no-check-certificate] [-][0.38s] CMD Result:success Run CMD Task:[wget http://mirror.fishros.com/install/tools/translation/assets/zh_CN.py -O /tmp/fishinstall//tools/translation/assets/zh_CN.py --no-check-certificate] [-][0.19s] CMD Result:success Run CMD Task:[wget http://mirror.fishros.com/install/tools/translation/assets/en_US.py -O /tmp/fishinstall//tools/translation/assets/en_US.py --no-check-certificate] [-][0.20s] CMD Result:success Run CMD Task:[wget https://fishros.org.cn/forum/topic/1733 -O /tmp/t1733 -q --timeout 10 && rm -rf /tmp/t1733] [-][0.80s] CMD Result:success 已为您切换语言至当前所在国家语言:zh_CN 基础检查通过... =============================================================================== ======欢迎使用一键安装工具,人生苦短,三省吾身,省时省力省心!======= ======一键安装已开源,请放心使用:https://github.com/fishros/install ======= =============================================================================== .-~~~~~~~~~-._ _.-~~~~~~~~~-. __.' ~. .~ `.__ .'// 开卷有益 \./ 书山有路 \ `. .'// 可以多看看小鱼的文章 | 关注B站鱼香ROS机器人 \ `. .'// .-~~~~~~~~~~~~~~-._ | _,-~~~~~~~~~~~. \`. .'//.-" `-. | .-' "-.\`. .'//______.============-.. \ | / ..-============.______\`. .'______________________________\|/______________________________` ---------------------------------------------------------------------- RUN Choose Task:[请输入括号内的数字] ---众多工具,等君来用--- ROS相关: [1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson) [3]:一键安装:rosdep(小鱼的rosdepc,又快又好用) [4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择) [9]:一键安装:Cartographer(18 20测试通过,16未测. updateTime 20240125) [11]:一键安装:ROS Docker版(支持所有版本ROS/ROS2) [16]:一键安装:系统自带ROS (!!警告!!仅供特殊情况下使用) 常用软件: [2]:一键安装:github桌面版(小鱼常用的github客户端) [6]:一键安装:NodeJS环境 [7]:一键安装:VsCode开发工具 [8]:一键安装:Docker [10]:一键安装:微信(可以在Linux上使用的微信) [12]:一键安装:PlateformIO MicroROS开发环境(支持Fishbot) [15]:一键安装:QQ for Linux 配置工具: [5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统) [13]:一键配置:python国内源 [17]:一键配置: Docker代理(支持VPN+代理服务两种模式) [0]:quit 请输入[]内的数字以选择:1 Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_ros.py -O /tmp/fishinstall/tools/tool_install_ros.py --no-check-certificate] [-][0.37s] CMD Result:success Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_config_rosenv.py -O /tmp/fishinstall/tools/tool_config_rosenv.py --no-check-certificate] [-][0.21s] CMD Result:success Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_config_system_source.py -O /tmp/fishinstall/tools/tool_config_system_source.py --no-check-certificate] [-][0.16s] CMD Result:success 欢迎使用一键安装ROS和ROS2,支持树莓派Jetson,本工具由作者小鱼提供 欢迎使用ROS开箱子工具,本工具由[鱼香ROS]小鱼贡献.. 小鱼:检测当前系统ubuntu22.04:jammy 支持一键安装ROS =========接下来这一步很很很很重要,如果不知道怎么选请选择1======== RUN Choose Task:[请输入括号内的数字] 新手或首次安装一定要一定要一定要换源并清理三方源,换源!!!系统默认国外源容易失败!! [1]:更换系统源再继续安装 [2]:不更换继续安装 [0]:quit 请输入[]内的数字以选择:2 ============正在添加ROS源密钥================= Run CMD Task:[sudo apt update] [-][12.17s] Get:28 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports noble-updates/restricted arm64 c-n-f Metadata [440 [-][13.08s] Get:32 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports noble-updates/universe arm64 c-n-f Metadata [25.4 k[-][13.17s] Get:36 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports noble-updates/multiverse arm64 c-n-f Metadata [408 [/][13.21s] Get:41 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports noble-backports/restricted arm64 c-n-f Metadata [11[/][13.37s] Get:45 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports noble-backports/universe arm64 c-n-f Metadata [1300[\][13.37s] Get:46 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports noble-backports/multiverse arm64 c-n-f Metadata [11[-][38.42s] Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4000:1::19). - connect (101: Network is unreachable) Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4000:1::16). - connect (101: Network is unreachable) Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4002:1::10a). - connect (101: Network is unreachable) Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4002:1::10c). - connect (101: Network is unreachable) Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4002:1::10b). - connect (101: Network is unreachable) Could not connect to ports.ubuntu.com:80 (91.189.91.104), connection timed out Could not connect to ports.ubuntu.com:80 (91.189.91.102), connection timed out Could not connect to ports.ubuntu.com:80 (185.125.190.39), connection timed out Could not connect to ports.ubuntu.com:80 (91.189.91.103), connection timed out Could not connect to ports.ubuntu.com:80 (185.[/][38.42s] Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4000:1::19). - connect (101: Network is unreachable) Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4000:1::16). - connect (101: Network is unreachable) Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4002:1::10a). - connect (101: Network is unreachable) Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4002:1::10c). - connect (101: Network is unreachable) Cannot initiate the connection to ports.ubuntu.com:80 (2620:2d:4002:1::10b). - connect (101: Network is unreachable) Could not connect to ports.ubuntu.com:80 (91.189.91.104), connection timed out Could not connect to ports.ubuntu.com:80 (91.189.91.102), connection timed out Could not connect to ports.ubuntu.com:80 (185.125.190.39), connection timed out Could not connect to ports.ubuntu.com:80 (91.189.91.103), connection timed out Could not connect to ports.ubuntu.com:80 (185.[-][38.60s] CMD Result:code:100 apt更新失败,后续程序可能会继续尝试...,[] Run CMD Task:[sudo apt search curl ] [-][0.12s] This package retrieves data from url-format files such as http://, ftp://, package:// file://, etc., and lo[-][0.12s] This package retrieves data from url-format files such as http://, ftp://, package:// file://, etc., and lo[-][0.12s] This package retrieves data from url-format files such as http://, ftp://, package:// file://, etc., and lo[-][0.12s] CMD Result:success Run CMD Task:[sudo apt install curl -y] [-][0.18s] CMD Result:success Run CMD Task:[sudo apt search gnupg2 ] [-][0.11s] CMD Result:success 没有找到包:gnupg2 正在挑选最快的密钥服务:['https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc', 'https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc'] - https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc 延时:0.55s - https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc 超时 已自动选择最快密钥服务:https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc Run CMD Task:[curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -] [-][0.66s] CMD Result:success Run CMD Task:[sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654] 没有找到包:aptitude Run CMD Task:[sudo apt install ros-humble-desktop -y] Reading package lists... Done Building dependency tree... Done Reading state information... Done Some packages could not be installed. This may mean that you have requested an impossible situation or if you are using the unstable distribution that some required packages have not yet been created or been moved out of Incoming. The following information may help to resolve the situation: The following packages have unmet dependencies: python3-catkin-pkg-modules : Depends: python3-dateutil but it is not installable Depends: python3-docutils but it is not installable ros-humble-action-tutorials-cpp : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-ament-cmake : Depends: cmake but it is not installable ros-humble-ament-cmake-core : Depends: cmake but it is not installable Depends: ros-humble-ament-package but it is not going to be installed ros-humble-ament-cmake-gmock : Depends: google-mock but it is not installable ros-humble-ament-cmake-gtest : Depends: libgtest-dev but it is not installable ros-humble-ament-cmake-pytest : Depends: python3-pytest but it is not installable ros-humble-ament-cppcheck : Depends: cppcheck but it is not installable ros-humble-ament-flake8 : Depends: python3-flake8 but it is not installable ros-humble-ament-pep257 : Depends: pydocstyle but it is not installable ros-humble-ament-xmllint : Depends: libxml2-utils but it is not installable ros-humble-class-loader : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libconsole-bridge-dev but it is not installable Depends: ros-humble-console-bridge-vendor but it is not going to be installed ros-humble-composition : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-demo-nodes-cpp : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-demo-nodes-cpp-native : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: ros-humble-fastrtps but it is not installable Depends: ros-humble-rmw-fastrtps-cpp but it is not installable ros-humble-depthimage-to-laserscan : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libopencv-core4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-flann4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-dev but it is not installable Depends: ros-humble-image-geometry but it is not going to be installed ros-humble-examples-rclcpp-minimal-composition : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-examples-rclcpp-minimal-subscriber : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-image-tools : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libopencv-core4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-highgui4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-imgcodecs4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-imgproc4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-videoio4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-dev but it is not installable ros-humble-intra-process-demo : Depends: libopencv-core4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-highgui4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-imgproc4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-videoio4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-dev but it is not installable ros-humble-joy : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: ros-humble-sdl2-vendor but it is not going to be installed ros-humble-kdl-parser : Depends: liborocos-kdl1.5 (>= 1.5.1) but it is not installable ros-humble-launch : Depends: python3-lark but it is not installable ros-humble-launch-testing : Depends: python3-pytest but it is not installable ros-humble-logging-demo : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-orocos-kdl-vendor : Depends: libeigen3-dev but it is not installable Depends: liborocos-kdl-dev but it is not installable ros-humble-pcl-conversions : Depends: libeigen3-dev but it is not installable Depends: libpcl-common1.12 but it is not installable Depends: libpcl-dev but it is not installable Depends: libpcl-io1.12 but it is not installable ros-humble-python-cmake-module : Depends: python3-dev but it is not installable ros-humble-python-orocos-kdl-vendor : Depends: python3-pykdl but it is not installable Depends: ros-humble-pybind11-vendor but it is not going to be installed ros-humble-python-qt-binding : Depends: libpyside2-dev but it is not installable Depends: libshiboken2-dev but it is not installable Depends: pyqt5-dev but it is not installable Depends: python3-pyqt5 but it is not installable Depends: python3-pyqt5.qtsvg but it is not installable Depends: python3-pyside2.qtsvg but it is not installable Depends: python3-sip-dev but it is not installable Depends: shiboken2 but it is not installable ros-humble-qt-dotgraph : Depends: python3-pydot but it is not installable ros-humble-quality-of-service-demo-cpp : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-rcl-logging-spdlog : Depends: libspdlog1-fmt8 but it is not installable Depends: libspdlog-dev but it is not installable Depends: ros-humble-spdlog-vendor but it is not going to be installed ros-humble-rcl-yaml-param-parser : Depends: libyaml-dev but it is not installable ros-humble-rclcpp-components : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-robot-state-publisher : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: liborocos-kdl1.5 (>= 1.5.1) but it is not installable ros-humble-ros2cli : Depends: python3-argcomplete but it is not installable Depends: python3-packaging but it is not installable ros-humble-ros2doctor : Depends: python3-psutil but it is not installable Depends: python3-rosdistro-modules but it is not going to be installed ros-humble-ros2pkg : Depends: python3-empy but it is not installable ros-humble-ros2topic : Depends: python3-numpy but it is not installable ros-humble-rosbag2-compression : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libtinyxml2-9 (>= 8.0.0) but it is not installable ros-humble-rosbag2-compression-zstd : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: ros-humble-zstd-vendor but it is not going to be installed ros-humble-rosbag2-cpp : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libtinyxml2-9 (>= 8.0.0) but it is not installable ros-humble-rosbag2-py : Depends: libtinyxml2-9 (>= 8.0.0) but it is not installable Depends: libyaml-cpp0.7 (>= 0.7.0) but it is not installable Depends: ros-humble-pybind11-vendor but it is not going to be installed ros-humble-rosbag2-storage : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libtinyxml2-9 (>= 8.0.0) but it is not installable Depends: libyaml-cpp0.7 (>= 0.7.0) but it is not installable Depends: ros-humble-yaml-cpp-vendor but it is not going to be installed ros-humble-rosbag2-storage-default-plugins : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libyaml-cpp0.7 (>= 0.7.0) but it is not installable Depends: ros-humble-yaml-cpp-vendor but it is not going to be installed ros-humble-rosbag2-transport : Depends: libyaml-cpp0.7 (>= 0.7.0) but it is not installable Depends: ros-humble-yaml-cpp-vendor but it is not going to be installed ros-humble-rosidl-cmake : Depends: python3-empy but it is not installable Depends: ros-humble-rosidl-adapter but it is not going to be installed Depends: ros-humble-rosidl-parser but it is not going to be installed ros-humble-rosidl-generator-c : Depends: python3-dev but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed Depends: ros-humble-rosidl-parser but it is not going to be installed ros-humble-rosidl-generator-cpp : Depends: python3-dev but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed Depends: ros-humble-rosidl-parser but it is not going to be installed ros-humble-rosidl-generator-py : Depends: python3-numpy but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed Depends: ros-humble-rosidl-parser but it is not going to be installed ros-humble-rosidl-runtime-py : Depends: python3-numpy but it is not installable Depends: ros-humble-rosidl-parser but it is not going to be installed ros-humble-rosidl-typesupport-c : Depends: python3-dev but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed ros-humble-rosidl-typesupport-cpp : Depends: python3-dev but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed ros-humble-rosidl-typesupport-fastrtps-c : Depends: python3-dev but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed ros-humble-rosidl-typesupport-fastrtps-cpp : Depends: python3-dev but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed ros-humble-rosidl-typesupport-introspection-c : Depends: python3-dev but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed Depends: ros-humble-rosidl-parser but it is not going to be installed ros-humble-rosidl-typesupport-introspection-cpp : Depends: python3-dev but it is not installable Depends: ros-humble-rosidl-cli but it is not going to be installed Depends: ros-humble-rosidl-parser but it is not going to be installed ros-humble-rqt-bag-plugins : Depends: python3-cairo but it is not installable Depends: python3-pil but it is not installable ros-humble-rqt-image-view : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libopencv-core4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libopencv-imgproc4.5d (>= 4.5.4+dfsg) but it is not installable Depends: libqt5core5a (>= 5.15.1) but it is not installable Depends: libqt5gui5 (>= 5.14.1) but it is not installable or libqt5gui5-gles (>= 5.14.1) but it is not installable Depends: libqt5widgets5 (>= 5.0.2) but it is not installable Depends: ros-humble-cv-bridge but it is not going to be installed Depends: ros-humble-image-transport but it is not going to be installed Depends: ros-humble-qt-gui-cpp but it is not going to be installed Depends: ros-humble-rqt-gui-cpp but it is not going to be installed ros-humble-rqt-plot : Depends: python3-matplotlib but it is not installable Depends: python3-numpy but it is not installable ros-humble-rqt-py-common : Depends: qtbase5-dev but it is not installable ros-humble-rviz-default-plugins : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: liborocos-kdl1.5 (>= 1.5.1) but it is not installable Depends: libqt5core5a (>= 5.14.1) but it is not installable Depends: libqt5gui5 (>= 5.2.0) but it is not installable or libqt5gui5-gles (>= 5.2.0) but it is not installable Depends: libqt5widgets5 (>= 5.0.2) but it is not installable Depends: libtinyxml2-9 (>= 8.0.0) but it is not installable Depends: ros-humble-rviz-ogre-vendor but it is not going to be installed Depends: libqt5gui5 but it is not installable Depends: libqt5opengl5 but it is not installable Depends: ros-humble-ignition-math6-vendor but it is not going to be installed Depends: ros-humble-image-transport but it is not going to be installed Depends: ros-humble-interactive-markers but it is not going to be installed Depends: ros-humble-laser-geometry but it is not going to be installed Depends: ros-humble-resource-retriever but it is not going to be installed Depends: ros-humble-rviz-common but it is not going to be installed Depends: ros-humble-rviz-rendering but it is not going to be installed ros-humble-rviz2 : Depends: libqt5widgets5 (>= 5.0.2) but it is not installable Depends: ros-humble-rviz-common but it is not going to be installed Depends: ros-humble-rviz-ogre-vendor but it is not going to be installed ros-humble-sqlite3-vendor : Depends: libsqlite3-dev but it is not installable ros-humble-sros2 : Depends: python3-lxml but it is not installable ros-humble-tango-icons-vendor : Depends: tango-icon-theme but it is not installable ros-humble-teleop-twist-joy : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-tf2 : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libconsole-bridge-dev but it is not installable Depends: ros-humble-console-bridge-vendor but it is not going to be installed ros-humble-tf2-bullet : Depends: libbullet-dev but it is not installable ros-humble-tf2-eigen : Depends: libeigen3-dev but it is not installable ros-humble-tf2-eigen-kdl : Depends: liborocos-kdl1.5 (>= 1.5.1) but it is not installable Depends: libeigen3-dev but it is not installable ros-humble-tf2-geometry-msgs : Depends: python3-numpy but it is not installable ros-humble-tf2-ros : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable ros-humble-tf2-sensor-msgs : Depends: libeigen3-dev but it is not installable Depends: python3-numpy but it is not installable Depends: ros-humble-sensor-msgs-py but it is not going to be installed ros-humble-tf2-tools : Depends: graphviz but it is not installable ros-humble-tinyxml2-vendor : Depends: libtinyxml2-dev but it is not installable ros-humble-turtlesim : Depends: libqt5core5a (>= 5.0.2) but it is not installable Depends: libqt5gui5 (>= 5.2.0) but it is not installable or libqt5gui5-gles (>= 5.2.0) but it is not installable Depends: libqt5widgets5 (>= 5.0.2) but it is not installable Depends: libqt5gui5 but it is not installable ros-humble-uncrustify-vendor : Depends: uncrustify but it is not installable ros-humble-urdf : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installable Depends: libtinyxml2-9 (>= 8.0.0) but it is not installable Depends: ros-humble-urdfdom but it is not going to be installed E: Unable to correct problems, you have held broken packages. Run CMD Task:[sudo apt install ros-humble-desktop -y] [|][0.02s] ros-humble-depthimage-to-laserscan : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installabl[-][0.02s] ros-humble-examples-rclcpp-minimal-composition : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is no[/][0.02s] ros-humble-examples-rclcpp-minimal-subscriber : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not[-][0.02s] Depends: ros-humble-pybind11-vendor but it is not going to be installe[\][0.02s] ros-humble-quality-of-service-demo-cpp : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not instal[\][0.02s] ros-humble-rosbag2-compression-zstd : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not installab[/][0.02s] ros-humble-rosbag2-storage-default-plugins : Depends: libconsole-bridge1.0 (>= 1.0.1+dfsg2) but it is not in[|][0.02s] Depends: ros-humble-yaml-cpp-vendor but it is not going to be i[/][0.03s] Depends: ros-humble-rosidl-cli but it is not going to be installe[|][0.03s] Depends: ros-humble-rosidl-cli but it is not going to be instal[/][0.03s] Depends: ros-humble-rosidl-cli but it is not going to be ins[\][0.03s] Depends: ros-humble-rosidl-parser but it is not going to be [-][0.03s] Depends: ros-humble-rosidl-cli but it is not going to be i[/][0.03s] Depends: ros-humble-rosidl-parser but it is not going to b[-][0.03s] Depends: ros-humble-ignition-math6-vendor but it is not going to be instal[\][0.03s] Depends: ros-humble-interactive-markers but it is not going to be installe[-][0.03s] CMD Result:code:100 lled ============================================================ 请注意我,检测你在安装过程中出现依赖问题,请在稍后输入n,再选择y,即可解决(若无法解决,清在稍后手动运行命令: sudo aptitude install ros-humble-desktop) 确认了解情况,请输入回车继续安装 Run CMD Task:[sudo aptitude install ros-humble-desktop] sudo: aptitude: command not found Run CMD Task:[sudo aptitude install ros-humble-desktop -y] [-][0.00s] CMD Result:code:1 Run CMD Task:[sudo apt search python3-colcon-common-extensions ] [-][0.06s] CMD Result:success Run CMD Task:[sudo apt install python3-colcon-common-extensions -y] [-][0.04s] CMD Result:code:100 Run CMD Task:[sudo apt search python3-argcomplete ] [-][0.05s] CMD Result:success 没有找到包:python3-argcomplete Run CMD Task:[sudo apt search python3-rosdep ] [-][0.11s] CMD Result:success Run CMD Task:[sudo apt install python3-rosdep -y] [-][0.08s] CMD Result:code:100 Run CMD Task:[ls /opt/ros/humble/setup.bash] [-][0.03s] CMD Result:code:2 安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题... Run CMD Task:[ls /opt/ros/humble/setup.bash] [-][0.00s] CMD Result:code:2 欢迎加入机器人学习交流QQ群:438144612(入群口令:一键安装) 鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或打开链接查看:https://item.taobao.com/item.htm?id=696573635888 如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈 检测到本次运行出现失败命令,直接退出按Ctrl+C,按任意键上传日志并退出5282c2a0-bfa1-44bd-b141-56a966ef7229-27499a63-d9a5-4ef6-9fb2-33fd890addce.png
截图 2025-06-24 11-42-02.png
报错信息:[ros2_control_node-6] [INFO] [1750770401.570871549] [resource_manager]: Loading hardware 'GazeboSystem'
[ros2_control_node-6] terminate called after throwing an instance of 'pluginlib::LibraryLoadException'
[ros2_control_node-6] what(): According to the loaded plugin descriptions the class gazebo_ros2_control/GazeboSystem with base class type hardware_interface::SystemInterface does not exist. Declared types are fake_components/GenericSystem mock_components/GenericSystem test_hardware_components/TestSystemCommandModes test_hardware_components/TestTwoJointSystem
我的相关包版本:
ros-humble-ros2-control is already the newest version (2.51.0-1jammy.20250617.234359);
ros-humble-ros2-controllers is already the newest version (2.47.0-1jammy.20250618.000355);
ros-humble-gazebo-ros2-control is already the newest version (0.4.10-1jammy.20250617.235819);
ros-humble-gazebo-ros-pkgs is already the newest version (3.9.0-1jammy.20250618.001012);
在/opt/ros/humble/share/gazebo_ros2_control/gazebo_hardware_plugins.xml描述性文件下,其定义的基类是gazebo_ros2_control::GazeboSystemInterface,而非系统提示的hardware_interface::SystemInterface,请问该如何解决?
我的ros2_control.xacro配置如下:
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
<param name="robot_sim_type">gazebo_ros2_control/GazeboSystem</param>
</hardware>
...
<gazebo>
<plugin name="gazebo_ros2_control" filename="libgazebo_ros2_control.so">
<parameters>$(find robot_description)/config/swhbot_ros2_controllers.yaml</parameters>
<robot_sim_type>gazebo_ros2_control/GazeboSystem</robot_sim_type>
<robot_param>/robot_description</robot_param>
</plugin>
</gazebo>
在本小节输入~/chapt6/chapt6_ws$ ros2 launch fishbot_description gazebo_sim.launch.py 后,终端出现报错:
zhao@zhao-VirtualBox:~/chapt6/chapt6_ws$ ros2 launch fishbot_description gazebo_sim.launch.py
[INFO] [launch]: All log files can be found below /home/zhao/.ros/log/2025-06-24-19-36-36-393800-zhao-VirtualBox-7831
[INFO] [launch]: Default logging verbosity is set to INFO
[ERROR] [launch]: Caught exception in launch (see debug for traceback): file not found: [Errno 2] No such file or directory: 'xacro'
bandicam 2025-06-24 13-42-26-992.jpg bandicam 2025-06-24 13-42-52-295.jpg 有没有大佬知道,仿真雷达的射线不均匀是怎么回事
python无法解析导入rclpy## pythone63f20348682b6b9bdd01eb7615197d.png
ThinkBook 16 G7+IAH笔记本电脑,处理器:Intel(R) Core(TM) Ultra 9 285H 2.90 GHz,显卡:Intel(R) Arc(TM) 140T GPU(16GB)。在wsl使用Ubuntu 22.04.5 LTS,运行rviz2报错如下图第一张,能打开rviz,但是什么也不显示,如下图第二张。求大神帮助
2e0aba00-63f3-4fcb-97af-c18fd2de0512-image.png
e2472ff4-cdbc-44a6-82c0-698373a9a2bc-image.png
请教大家个问题,nav2中全局路径规划器为什么会一直规划路径呢? 小车在行使过程中最开始的路径规划挺好的,但是随着小车向前移动,路径规划的反而越来越差了,如何让它只规划一次呢?
b站视频课2.1.2里面,我在cmakelist里面添加了相关的头文件和库文件,cmake ./可以运行,进行make的时候直接报了个我看不懂的错误
b9fd433b-6119-4e2f-aa31-afbc6de23461-3f2b0505-7dd7-4f9a-99ef-2bad1772d3e8.png
73560c43-01b7-4241-b83e-b650120c1737-f733586c-ee05-4039-b65a-8cd8c84e0b63.png
34f70360-a451-4367-ac4f-c89108868dde-ac008a27ef3f58e691d4a5fc9d372ad6.png
v
@小鱼
按书上代码创建node fishbot_motion_control, rclc_node_init_default 返回0,但 node listnode fishbot_motion_control 在node list
micro_ros_agent 日志, 看着是能正常连接并create_topic、create_publisher:
ros2 run micro_ros_agent micro_ros_agent udp4 --port 8000 [1750427414.761658] info | UDPv4AgentLinux.cpp | init | running... | port: 8000 [1750427414.761905] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 4 [1750427424.983911] info | Root.cpp | create_client | create | client_key: 0x79F62086, session_id: 0x81 [1750427424.984123] info | SessionManager.hpp | establish_session | session established | client_key: 0x79F62086, address: 192.168.31.246:16415 [1750427425.044061] info | ProxyClient.cpp | create_participant | participant created | client_key: 0x79F62086, participant_id: 0x000(1) [1750427425.188799] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x79F62086, topic_id: 0x000(2), participant_id: 0x000(1) [1750427425.260997] info | ProxyClient.cpp | create_subscriber | subscriber created | client_key: 0x79F62086, subscriber_id: 0x000(4), participant_id: 0x000(1) [1750427425.364820] info | ProxyClient.cpp | create_datareader | datareader created | client_key: 0x79F62086, datareader_id: 0x000(6), subscriber_id: 0x000(4) [1750427425.399368] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x79F62086, topic_id: 0x001(2), participant_id: 0x000(1) [1750427425.441572] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x79F62086, publisher_id: 0x000(3), participant_id: 0x000(1) [1750427425.454749] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x79F62086, datawriter_id: 0x000(5), publisher_id: 0x000(3)node list 看不到fishbot_motion_control
********:~/studio/fishbot_control/fishbot_agent$ ros2 node list ********:~/studio/fishbot_control/fishbot_agent$6fbba418-23f8-4345-8ab8-df81d0598746-image.png
下面是我建的图
3205b4e9-9aed-4a08-9eb1-dbba9287e2da-image.png
发现无法导航,
60ebb863-28bb-476d-91b6-0db604b32f9a-image.png
这是导航navigation2.launch.py的报错
341e770a-e0e3-47ba-92fd-37227a816f9a-image.png
这是bringup.launch.py的报错
d97682eb-ab24-4859-a177-308ce3f64fbd-image.png
3.png 我cmake出现这个错误,不知道哪里有问题,和老师一起写的
CMake Error at CMakeLists.txt:9 (target_include_directories):
target_include_directories called with invalid arguments
标题:无法用到wsl运行ros2 run turtlesim turtlesim_node
提问模板:
背景(可选):
问题描述:
[在这里详细描述您遇到的问题。请确保您提供了足够的背景信息,以便其他人能够理解您的问题。]
具体细节和上下文:PS C:\Users\Administrator> wsl
xiangyang@DESKTOP-2KPADL6:/mnt/c/Users/Administrator$ ros2 run turtlesim turtlesim_node
qt.qpa.xcb: could not connect to display
qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "" even though it was found.
This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem. Available platform plugins are: eglfs, linuxfb, minimal, minimalegl, offscreen, vnc, xcb. [ros2run]: Aborted
从网上以及的deep seek搜索解决方法,感觉不行;也没太弄明白如何一步步操作
版块
-
1.3k
主题4.8k
帖子 -
443
主题2.9k
帖子 -
63
主题251
帖子 -
1.0k
主题4.3k
帖子 -
990
主题3.6k
帖子 -
5
主题11
帖子 -
357
主题1.6k
帖子